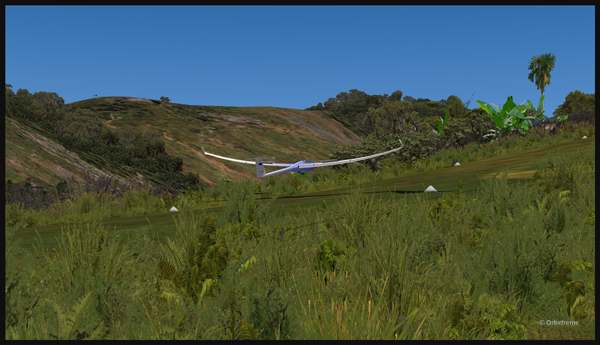
Tout est maintenant prêt! Le premier planeur est arrivé à l’aéroport de Fane Parish en Papouasie Nouvelle-Guinée …
Planeur sur la courte piste en gazon et en pente de Fane Parish en Papouasie Nouvelle-Guinée.
Avant que ce soit officiellement offert en tant qu’attraction touristique pour la région, quelques essais de décollage et atterrissage doivent être effectués. Le premier essai attire quelques curieux!
Avion et planeur sur la piste en montagne de Fane Parish.
La descente le long de la piste en pente de 12 degrés secoue un peu et le devant des ailes est un peu égratigné. Certains petits buissons devront être élagués!
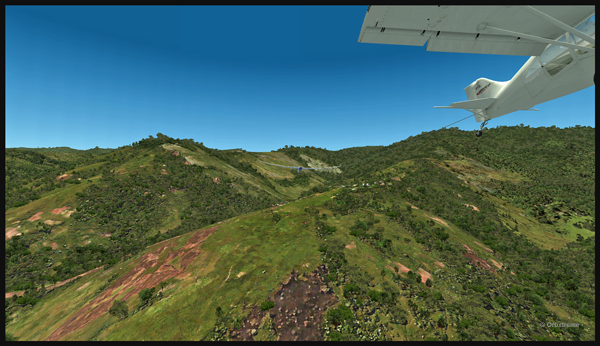
Un aéronef tire un planeur au décollage de la piste en pente de Fane Parish en Papouasie Nouvelle-Guinée.
La météo est superbe et la température très chaude. Le seul problème potentiel est la montagne droit devant.
Planeur tiré par un avion après le décollage de la piste en montagne de Fane Parish.
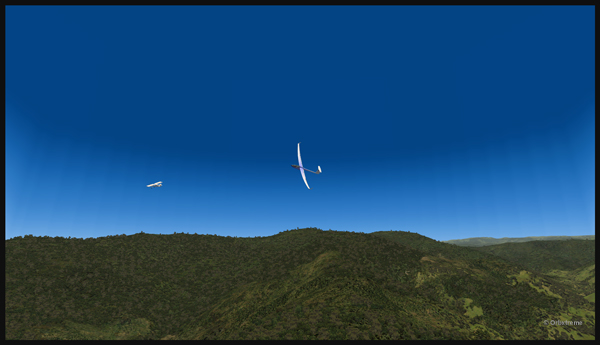
Le pilote coupe finalement le lien. Il est libre d’explorer les environs!
Lien coupé entre l’avion et le planeur après le décollage de Fane Parish.
Le planeur survole silencieusement la jungle de la Papouasie Nouvelle-Guinée.
Survol du territoire de la Papouasie Nouvelle-Guinée avec un planeur virtuel (FSX)
Utilisant les courants d’air chaud, le planeur gagne en altitude.
Le planeur prend de l’altitude.
Pourquoi pas un survol du village de Fane?
Survol du village de Fane Parish avec un planeur virtuel.
Et voici un autre village isolé le long de la montagne.
Vol avec planeur virtuel au-dessus d’un village isolé de Papouasie Nouvelle-Guinée
Un dernier virage serré pour débuter l’approche vers Fane Parish.
Dernier virage serré pour un atterrissage court sur la piste en pente de Fane Parish
Les aérofreins sont sortis et la vitesse est raisonnable. La piste en pente est juste devant, sur le sommet de la montagne de droite.
Approche d’un planeur pour la piste en terrain élevé de Fane Parish en Papouasie Nouvelle-Guinée. La vitesse est appropriée et l’angle est bon.
Il faut conserver juste assez d’altitude pour être certain de se rendre jusqu’à la piste.
Planeur en approche pour la piste en pente de 12 degrés de l’aéroport de Fane Parish.
Maintenant que l’atterrissage est assuré, il est temps d’utiliser les aérofreins pour ralentir le planeur.
Planeur virtuel arrivant au-dessus de la piste de Fane Parish en Papouasie Nouvelle-Guinée. Les aérofreins sont sortis.
Étant donné que cette piste d’atterrissage en altitude a une bonne pente, il est préférable de conserver un peu de vitesse. Aucun pilote n’apprécie un décrochage à quelques pieds au-dessus de la piste.
Planeur virtuel avec aérofreins au-dessus de la piste de Fane Parish
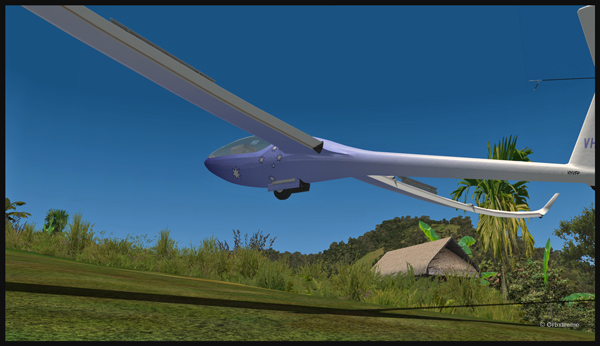
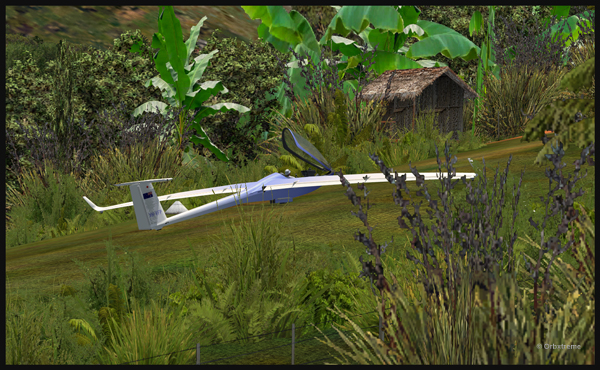
Quelle expérience! Mais le pilote aura besoin d’aide pour remonter le planeur le long de la pente!
Planeur sur la piste de Fane Parish
Le vol était superbe, la vue en valait vraiment la peine. Je pense que cette activité de planeur pourrait devenir une attraction touristique pour la région et les visiteurs plus fortunés …
Planeur atterri sur la piste de l’aéroport de Fane Parish en Papouasie Nouvelle-Guinée
La scène virtuelle est une création de Ken Hall et Tim Harris pour la compagnie ORBX.
Il n’y a pas d’aéronefs dans le ciel aux environs de l’aéroport virtuel de Port Moresby Jacksons (AYPY) aujourd’hui. Aucun aéronef sauf un, chargé d’une évacuation médicale.
Arrivée du Medevac vers l’aéroport de Port Moresby Jacksons (AYPY). Les vents empêchent un atterrissage normal.
Les vents soufflent du 240 degrés à 50G60 nœuds et les pistes sont orientées 14/32. Cela dépasse largement les vents de travers autorisés pour les aéronefs.
Mais l’équipage du Rockwell Shrike Commander 500S ne peut attendre que le vent se calme. Il doit atterrir dans les prochaines minutes pour espérer sauver la vie du patient.
L’aéroport de Port Moresby Jacksons (AYPY) est en vue en haut au centre de la photo.
Étant donné qu’il n’y a aucun trafic aérien autour de l’aéroport, le commandant de bord a signifié aux contrôleurs aériens son intention d’effectuer une approche sécuritaire mais qui sort de la norme établie.
L’avion est placé graduellement pour arriver en ligne droite vers le hangar de AYPY.
L’avion s’aligne face au vent pour l’approche à travers les pistes.
Arrivant directement à travers les pistes, face au vent, l’équipage a l’intention de faire atterrir l’avion à quelques pieds d’un hangar. Le capitaine demande que quelqu’un ouvre la porte du hangar immédiatement. L’approche se terminera devant les portes du hangar, protégée du vent.
Trajet du Shrike Commander 500S vers le hangar de l’aéroport de Port Moresby Jacksons. La porte est ouverte pour l’arrivée.
Il est plus sécuritaire d’arriver directement face au vent et d’entrer immédiatement dans le hangar. Il faut éviter de circuler avec des vents de 60 nœuds de travers.
Inutile de dire que le contrôleur aérien a refusé la demande. Le capitaine d’un avion est cependant le seul qui décide de la meilleure surface pour l’atterrissage, autant pour la sécurité des passagers que pour lui-même. Il procède avec son approche, après avoir clairement indiqué quelle trajectoire sera suivie.
Le Shrike Commander 500S au-dessus des habitations près de Port Moresby Jacksons.
Le problème principal pour l’approche est la turbulence mécanique de bas niveau causée par les vents en rafales de 60 nœuds.
Si l’ATC veut faire une plainte, le moment est arrivé : il est possible de prendre une photo de l’avion de même que de son immatriculation.
Vol par le travers de la tour de contrôle de AYPY.
La vitesse-sol de l’avion se situe autour de 20 nœuds.
Le Shrike Commander 500S en approche à travers les pistes de l’aéroport de Port Moresby Jacksons. Les vents soufflent du 240 degrés à 50G60.
La vitesse stable des vents est actuellement plus sécuritaire que si les vents étaient du 240 à 35G60.
Vitesse-sol de 20 noeuds pour le Shrike Commander 500S en finale pour le hangar de Port Moresby Jacksons (AYPY).
Toujours légèrement au-dessus de la piste et à une vitesse-sol entre 10 et 20 nœuds. L’anémomètre indique la vitesse du vent lui-même additionnée à celle de la vitesse-sol.
Vitesse indiquée 70 noeuds.
Vue frontale du Shrike Commander 500S pendant l’arrondi devant le hangar de AYPY.
L’avion flotte comme une montgolfière ou presque!
Vue latérale du Shrike Commander 500S en finale pour le hangar à Port Moresby Jacksons.
Le Shrike Commander atterrira sous peu à Port Moresby Jacksons.
Au moment où l’avion touche le sol, il arrête presqu’immédiatement. Il est même nécessaire de mettre les gaz pour atteindre le hangar, comme en témoigne les traînées blanches derrière l’appareil.
Dans la vraie vie, le touché des roues se serait fait dès que débute l’asphalte étant donné que la présence du hangar réduit un peu la vitesse du vent.
Atterrissage du Shrike Commander quelques pieds avant le hangar. Du pouvoir supplémentaire est nécessaire pour atteindre le hangar.
Quelques secondes après s’être posé, l’avion est dans le hangar, protégé du vent, et autant le médecin que le patient peuvent rapidement être conduits à l’hôpital.
Le Shrike Commander 500S dans le hangar à Port Moresby (AYPY).
Une fois dans le hangar, les vents virtuels sont ajustés à zéro, ce qui est logique, à moins que le mur opposé du hangar soit absent!
Vue verticale de l’aéroport de Port Moresby Jacksons (AYPY)
Il est maintenant temps de se préparer à affronter une autre tempête, celle de l’enquête qui suivra possiblement l’atterrissage!
(P.S. : Tim Harris et Ken Hall ont été les créateurs de cet aéroport virtuel de Port Moresby Jacksons. Ce dernier est vendu par Orbx et l’avion virtuel est venu par Carenado).
Le MD-11 virtuel conçu par la compagnie Rotate pour la plateforme de simulation de vol X-Plane
Bonne nouvelle pour les amateurs de simulation de vol. Ceux qui désespéraient de pouvoir trouver un MD -11 virtuel pourront se réjouir.
La compagnie ROTATE, qui fait des aéronefs virtuels pour la plateforme de simulation de vol X-Plane a décidé de se lancer dans la conception d’un MD -11 virtuel. Elle a tout un défi sur les bras mais les progrès sont constants.
Il y a plusieurs années, une autre compagnie, PMDG, avait conçu un MD -11 virtuel mais elle a par la suite décidé de délaisser les clients qui s’étaient procuré cet excellent appareil en n’offrant plus de mises à jour. Elle a éventuellement tout simplement enlevé le MD -11 de sa liste de produits.
Depuis ce temps, de nombreux amateurs de simulation de vol se demandaient s’ils pourraient un jour avoir le plaisir d’apprendre à piloter le MD -11. De nombreux écrasements d’avion MD -11 sont survenus depuis sa conception. Ils s’agissaient surtout d’erreurs de pilotage, sauf dans le cas de Swissair 111.
Le personnel de Rotate a récemment publié sur sa page WEB une nouvelle photo (ci-haut) pour montrer l’avancement des travaux. La qualité graphique est vraiment superbe.
Dans une entrevue donnée à PC Pilot pour l’édition de mars/avril 2018, les concepteurs disaient qu’ils entendent offrir un haut niveau de simulation de vol avec le MD -11, mais que tout n’est pas encore joué : « Le MD -11 est beaucoup plus gros et beaucoup plus complexe que le MD -80 [que nous offrons déjà] et nous voulons que la simulation reflète cela ».
Ceux qui volent en utilisant FSX pourront désormais ajouter X-Plane dans leur simulateur de vol et ainsi bénéficier du MD -11 de Rotate lorsqu’il sera prêt (probablement vers la fin 2019).
La beauté avec X-Plane est que la plateforme de 64 bits utilise de façon à peu près égale les six cœurs des nouveaux processeurs sur le marché. Le nombre de FPS est donc très élevé, ce qui permettra d’utiliser le MD -11 autour des grands aéroports virtuels et lors de météo complexe sans avoir à faire de compromis.
Une autre bonne nouvelle est que la compagnie ORBX offre désormais des produits adaptés pour X-Plane, ce qui accroîtra grandement l’offre de scènes virtuelles de qualité.
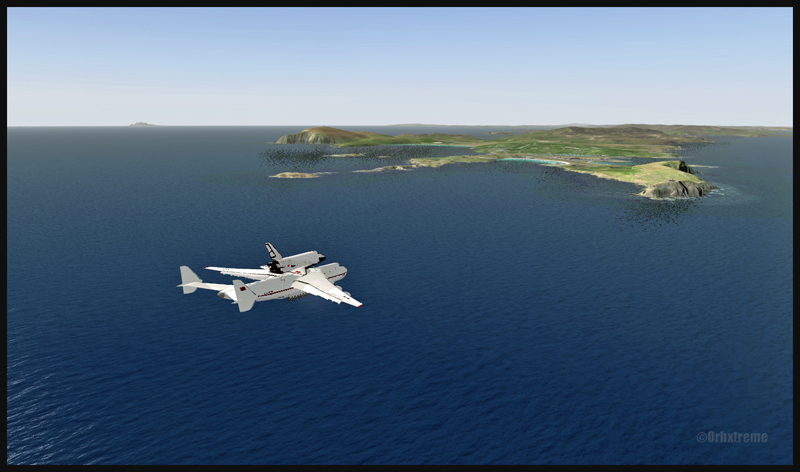
Antonov 225 avec la navette russe Bourane en rapprochement pour Sumburgh, Écosse (FSX)
Antonov 225 avec la navette Bourane en approche finale de Sumburgh, Scotland (FSX)
Je sais, Sumburgh n’est pas un aéroport destiné à recevoir l’Antonov 225, encore moins avec la navette russe Bourane comme cargo. En fait, cet aéronef et Sumburgh s’excluent mutuellement. Mais pour les amateurs de simulation de vol qui désirent tenter quelque chose d’insensé, c’est l’occasion. En faisant ce vol, il faut oublier le poids de l’aéronef sur la piste, l’espace insuffisant pour circuler et pour stationner et la distance requise pour redécoller. Il est probable qu’il devienne un avion-musée sur l’aéroport une fois atterri.
Antonov 225 avec la navette Bourane en courte finale pour Sumburgh, Scotland (FSX)
Antonov 225 avec la navette Bourane au-dessus de la piste de Sumburgh, Scotland (FSX)
Vitesse 126 kts sur la piste de Sumburgh, Écosse, avec l’Antonov 225 et la navette russe Bourane (FSX)
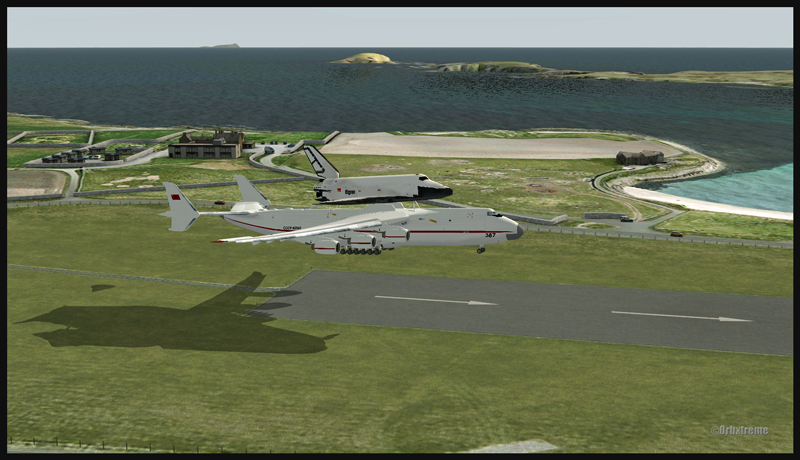
Antonov 225 circule sur la rampe à Sumburgh, Écosse (FSX)
Il est bon, malgré tout, de se rappeler les performances exceptionnelles de cet appareil. Au cours d’une démonstration au-dessus du Bourget, il vira en maintenant un angle de 45° avec la navette Bourane de 62 tonnes fixée sur son fuselage. L’approche se fait à une vitesse étonnamment lente pour le poids de l’appareil et le freinage est reconnu comme étant remarquable. Vous avez le choix entre deux pistes (4700 à 4900 pieds). Oubliez la finale sécuritaire, il faut arriver en rase-mottes. Il est possible de télécharger l’Antonov 225 et la navette gratuitement. Quant à Sumburgh, il s’agit d’une création payante de ORBX.
Ce vol se retrouve également dans la section des vols virtuels insensés du présent site web.
Le C-130 virtuel des Blue Angels circule à l’aéroport de High River, en Alberta.
Dans le but de rajouter un vol pratiquement impossible dans la section des vols insensés de mon site web, j’ai tenté une panne graduelle des quatre moteurs du C-130 (Captain Sim) des Blue Angels.
Le C-130 Hercules des Blue Angels en attente derrière un monomoteur à l’aéroport de High River.
Je sais que les mécaniciens des Blue Angels sont des professionnels, alors j’assume dès lors que la panne a été causée par une raison indépendante de cette équipe.
Décollage du Lockheed C-130 Hercules des Blue Angels de l’aéroport canadien de High River (CEN4) en Alberta.
Le décollage se fait sans problème de l’aéroport canadien de High River (CEN4), un aéroport gratuit conçu par Vlad Maly et disponible chez ORBX. L’avion quitte la piste de 4150 pieds à destination de l’aéroport de Cœur d’Alène (KCOE) aux États-Unis.
Le premier moteur lâche. Ça ne cause pas de problème important. Mise en drapeau et la montée graduelle continue.
Le C-130 Hercules perd un premier moteur.
Le deuxième moteur s’arrête. Il faut oublier la destination initiale. Le déroutement se fera vers Bonners Ferry (65S) car la piste de 4000 pieds par 75 pieds de large est suffisante pour le C-130.
Le deuxième moteur vient de s’arrêter sur le C-130 Hercules.
Double panne de moteurs sur le C-130 Hercules virtuel des Blue Angels.
Le troisième moteur lâche. Une lente descente débute. Bonners Ferry n’est plus bien loin. L’aéroport est à une altitude de 2337 ft asl.
L’avion est volontairement piloté à une altitude un peu trop haute pour une approche normale, au cas où le quatrième moteur s’arrête. Quand trois moteurs s’arrêtent après le même plein d’essence, le pilote est autorisé à penser que ce qui alimente le quatrième moteur risque également de causer des problèmes.
Trois pannes de moteur sur ce C-130 Hercules virtuel des Blue Angels.
Les montagnes les plus importantes sont maintenant passées.
Avion virtuel C-130 Hercules avec trois moteurs en panne en route vers l’aéroport de Bonners Ferry.
La piste de Bonners Ferry (65S) est en vue.
Avion virtuel C-130 Hercules avec trois moteurs en panne, par le travers de la piste de Bonners Ferry.
Le quatrième moteur s’arrête. Les volets ne sont plus fonctionnels pour l’atterrissage.
Dès maintenant, il faut sauvegarder le vol virtuel à quelques reprises parce qu’il est possible que plusieurs tentatives d’atterrissage soient effectuées en vol plané. De là vient le plaisir du vol virtuel.
Les quatres moteurs sont maintenant en panne sur ce C-130 virtuel.
Le C-130 Hercules est désormais un gros planeur. Quand la même vitesse est conservée, l’avion perd un peu plus de 1000 pieds à la minute. L’inertie est importante.
Les roues ne seront sorties qu’au moment nécessaire car le train d’atterrissage augmente passablement la traînée.
De la position indiquée dans la photo ci-dessous, il est impossible d’arriver directement en ligne droite, l’avion passera au-dessus de la piste. L’avion semble pourtant à une altitude intéressante, mais il s’agit d’une illusion causée par le choix du format grand angle pour la capture d’écran.
L’avion est définitivement trop haut. Et impossible d’utiliser les volets pour augmenter le taux de descente.
Avion Lockheed C-130 Hercules virtuel avec quatre moteurs en panne en approche pour l’aéroport virtuel de Bonners Ferry (65S).
Il faut choisir entre 1) des glissades sur l’aile 2) un virage de 360 degrés pour perdre de l’altitude ou 3) des virages à grande inclinaison en direction de la piste pour augmenter la distance à parcourir.
Quel serait votre choix?
Il n’y a jamais de méthode universelle. Le virage de 360 degrés est le plus risqué mais il peut s’avérer nécessaire. Cela a réussi au commandant Robert Piché aux Açores en 2001 avec son Airbus A330-200 en vol plané). Mais ici, je ne crois pas avoir suffisamment d’altitude en réserve pour compléter le 360 et atteindre la piste.
Il faudra plutôt faire quelques zigzags à grande inclinaison pour rallonger le trajet vers la piste. Pourquoi à grande inclinaison? Pour éviter de trop se rapprocher de l’aéroport tant que l’altitude n’est pas acceptable. Cette méthode devrait permettre de garder un œil en tout temps sur la piste pour vérifier si la pente est toujours bonne pour planer jusqu’à l’aéroport.
Virage de 40 degrés vers la droite en approche pour Bonners Ferry.
Virage grande inclinaison à gauche pour rallonger la distance vers l’aéroport de Bonners Ferry.
J’ai essayé les trois méthodes, toujours à partir du même vol sauvegardé (photo 10). Malgré plusieurs glissades sur l’aile, l’avion se rapproche trop vite de la piste et la vitesse finale se révèle trop élevée pour arrêter un C-130 sans volets ni inverseurs de poussée.
Le virage de 360 degrés, qu’il soit à droite ou à gauche, avec des angles différents et une vitesse raisonnable, fait perdre trop d’altitude à l’appareil. Indéniablement, l’aéronef se présentait toujours entre 200 et 300 pieds avant le seuil de piste.
Finalement, après quelques virages à grande inclinaison, l’avion a été positionné en finale avec la bonne vitesse et la bonne altitude.
Vue du Lockheed C-130 Hercules avec quatre moteurs en panne, en approche pour Bonners Ferry (65S).
Quelques ajustements à la dernière seconde, pour se réaligner au centre de la piste.
Vitesse 150 noeuds. Fin de virage vers Bonners Ferry.
À 140 kts, mais sans inverser la poussée, toute la piste devrait être nécessaire pour arrêter l’appareil.
Vitesse 140 noeuds, enligné avec la piste de Bonners Ferry.
L’atterrissage s’est fait en douceur et l’aéronef s’est immobilisé un peu avant la fin de la piste.
Pour une raison que j’ignore, l’anémomètre indiquait toujours une dizaine de nœuds même lorsque l’avion était arrêté.
Avion-cargo C-130 immobilisé sur la piste de Bonners Ferry.
Avion Lockheed C-130 Hercules virtuel après l’atterrissage à l’aéroport de Bonners Ferry (65S).
Avion C-130 Hercules immobilisé sur la piste de Bonners Ferry.
Essayez ce genre de vol en mode virtuel! Le pire qui puisse arriver est que vous ayez du plaisir!
Pour d’autres vols virtuels insensés, cliquez ici:
Le vol virtuel ci-dessous a été effectué avec la plateforme FSX. La dernière fois que j’ai atterri et décollé de Limberlost Ranch, c’était avec un Cessna C-207 ( Limberlost Ranch et le Cessna C-207 ).
Cette fois, j’ai essayé cette piste latéralement inégale et en pente avec un Twin Otter. Ce dernier est aux couleurs réelles du Ministère des ressources naturelles de l’Ontario (C-FOPG). Le seul problème qui pouvait se poser était la largeur des ailes une fois rendu près du hangar.
En finale pour la piste en pente de Limberlost Ranch
Approche du Twin Otter C-FOPG pour la courte piste de Limberlost Ranch
Finalement, tout s’est bien passé. La seule vraie difficulté est de manœuvrer près du hangar pour repositionner le Twin Otter pour le décollage. En modifiant continuellement le pas de l’hélice, cela finit par fonctionner.
Arrivée à Limberlost Ranch du Twin Otter C-FOPG
Avion virtuel du gouvernement de l’Ontario faisant demi-tour sur la piste de Limberlost Ranch.
La clôture n’étant pas trop haute, elle ne présente pas de problème pour les ailes de l’aéronef.
Aéronef virtuel C-FOPG roule sur la piste de Limberlost Ranch (CA21)
Au bout de la courte piste en gazon, quelques grands arbres obligent à effectuer un léger virage alors que l’avion est en montée. Juste au cas où …
Avion Twin Otter quittant Limberlost Ranch (CA21)
Limberlost Ranch est un défi amusant. L’aérodrome est vendu par Orbx et vient avec l’aéroport Blue-Canyon Nyack.
Si cela n’est pas suffisant pour l’amateur de simulation de vol, il n’y a qu’à rajouter de bons vents directement de travers et le tour sera joué!
Un défi intéressant pour les amateurs de simulation de vol consiste à rechercher puis intercepter les aéronefs virtuels qui se déplacent de façon autonome, c’est-à-dire ceux dont on ne connaît pas le plan de vol.
Le degré de difficulté varie en fonction de l’aéronef qui est intercepté, et de l’intercepteur.
La capture d’écran ci-dessous montre une interception relativement simple car il est n’est pas trop difficile pour le AV-8B Harrier de modifier sa vitesse pour l’ajuster à la vitesse de croisière relativement élevée du Beechcraft B350.
Avion virtuel Beechcraft B350 intercepté par un AV-8B Harrier.
Pour compliquer un peu la chose, l’amateur de simulation de vol pourra tenter l’interception en vol d’un aéronef relativement lent au moyen d’un jet militaire.
Un vol virtuel exigeant consistera alors à utiliser, par exemple, un CF-18 en tentant d’adapter sa vitesse et son altitude à celles de l’aéronef intercepté et de voler à ses côtés pendant une minute. Pour se faire, il faudra nécessairement placer le CF-18 en configuration de vol lent, avec train d’atterrissage sorti.
Avion virtuel Cessna C208 intercepté par un CF-18
Ce genre d’interception est parfois effectué dans la vie réelle lorsqu’un avion s’engage par mégarde dans une zone interdite aux aéronefs civils : un jet militaire doit alors le prendre en chasse, puis s’en approcher et lui faire des signaux lui ordonnant de le suivre jusqu’à la base militaire la plus proche.
Une fois établi en vol, n’oubliez pas de capturer l’expérience en photo! Bonne chance et bon vol!
Faire un atterrissage virtuel en manuel à Innsbruck (ICAO : LOWI) avec un très gros porteur comme le MD -11F amusera tout amateur de simulation de vol. Depuis que l’aéroport et les environs d’Innsbruck ont été modélisés sous ORBX Innsbruck, la sensation d’immersion est totale. Le paysage est à couper le souffle.
Le MD-11F virtuel de Martinair Cargo au décollage de la piste 26 de l’aéroport de Innsbruck (LOWI)
Commencez par décoller de la piste 08, en décoiffant certainement un peu les observateurs qui se trouveraient en bout de piste. Il faut ensuite prendre suffisamment d’altitude pour pouvoir effectuer un virage de 180 degrés dans le but de vous réaligner sur la piste 26.
Un MD-11F de PMDG se prépare pour une approche visuelle piste 08 à Innsbruck
Il faut s’assurer d’activer la fonction « turbulence » de votre moteur météo virtuel, car l’approche près des montagnes génère généralement de la turbulence qui peut rendre l’approche plus difficile. Le pilote virtuel doit également composer avec les vents du moment, même s’ils ne favorisent pas la piste 26.
MD-11F virtuel de Martinair Cargo en approche pour l’aéroport d’Innsbruck (LOWI)
Les volets doivent être réglés à 50 degrés pour le MD-11F. La fonction « Autopilot » doit être à « OFF ». L’ajustement de l’intensité du freinage automatique se fait en fonction des vents du moment et du poids que vous avez choisis pour l’appareil pour un atterrissage sur un aéroport situé à 2000 pieds d’altitude. La marge de manœuvre quant à la vitesse d’approche n’est pas très grande. J’ai tenté de maintenir environ 150 KTS.
Le MD-11F virtuel de PMDG avec 50 degrés de volets en finale pour la piste 08 à Innsbruck
La piste d’Innsbruck est longue de 2000 mètres . Il n’y a pas beaucoup de réserve pour un MD-11F.
Arrivée du MD-11F virtuel conçu par PMDG sur la piste 08 à Innsbruck
MD-11F virtuel conçu par PMDG en freinage piste 08 à Innsbruck
Une fois au sol, il faut continuer jusqu’au bout de la piste 26 pour pouvoir effectuer un virage de 180 degrés. Il y a juste assez d’espace pour le MD-11F.
MD-11F virtuel de Martinair Cargo remonte la piste 08 après l’atterrissage à Innsbruck
Comme vous pouvez le constater dans l’image ci-dessous, en regardant la manche à vent, l’atterrissage s’est fait par un bon vent trois quarts arrière.
MD-11F virtuel de Martinair Cargo quitte la piste de l’aéroport d’Innsbruck
L’aéroport est superbement modélisé et une place de stationnement est déjà réservée pour les très gros porteurs. Des employés sont en place et attendent votre arrivée.
Aéroport d’Innsbruck virtuel et MD-11F de Martinair Cargo
MD-11F virtuel conçu par PMDG stationné à l’aéroport d’Innsbruck en Autriche
MD-11F virtuel de Martinair Cargo stationné à l’aéroport de Innsbruck
Vous pouvez tenter l’expérience avec tout autre gros porteur si vous ne possédez pas déjà un MD -11 virtuel de la compagnie PMDG. Si toutefois vous désirez acquérir cet aéronef virtuel, vous constaterez qu’il ne semble plus offert, pour le moment, par la compagnie PMDG. Tentez de faire pression auprès de cette compagnie pour qu’elle offre de nouveau cet appareil sur lequel elle a mis tant d’heures de travail. Un message sur leur site Facebook devrait leur montrer votre intérêt : https://www.facebook.com/pmdgsimulations
Si vous désirez voir un vidéo exceptionnel de plus de deux heures sur un voyage réel de dix jours à travers le monde effectué par Lufthansa Cargo avec un MD-11 F, il n’y a rien de mieux que le produit offert par la compagnie PilotsEYE.tv : Lufthansa Cargo MF-11F in Quito
DVD de PilotsEye sur un voyage de 10 jours à travers le monde avec un MD-11F de Lufthansa Cargo
La préparation de l’équipage pour un atterrissage difficile sur l’ancienne piste de Quito, Équateur, est remarquable. L’altitude de l’aéroport fait en sorte que le MD -11F opère alors à la limite de ses capacités. Assurez-vous de posséder un lecteur pouvant décoder les vidéos européens.
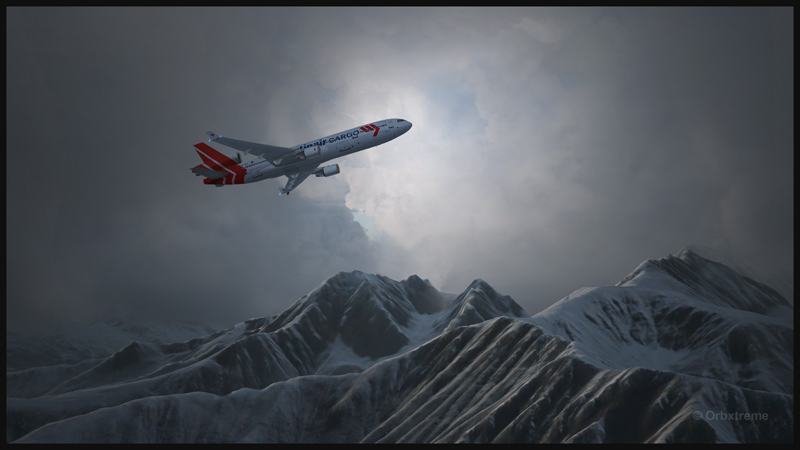
Un gros porteur MD-11 de la compagnie brésilienne VASP en finale pour l’aéroport international de Guarulhos à Sao Paulo.
L’image ci-dessus représente un aéronef virtuel MD-11 aux couleurs de la compagnie VASP au-dessus de Sao Paulo. Dans le simulateur de vol, je l’ai positionné en finale pour l’aéroport international de Guarulhos (IATA : GRU, ICAO : SBGR) au Brésil. Ce MD-11 a été conçu par la compagnie PMDG.
Le paysage est une création de la compagnie Orbx et comprend des couches successives de leurs produits pour en arriver à cet aspect final. Il y a tout d’abord FTX Global Base Pack, puis FTX Global openLC South America et FTX Global Vector. Pour compléter le tout, mais qui n’est pas vraiment visible dans cette capture d’écran de début de nuit, FTX Global Trees HD.
Un MD-11 cargo virtuel de la compagnie Martinair décolle de l’aéroport de Innsbruck en Autriche.
Les montagnes entourant l’aéroport de Innsbruck servent de toile de fond au décollage de ce MD-11 virtuel de Martinair Cargo.
Les deux photos ci-dessus montrent un MD-11 virtuel au décollage d’Innsbruck en Autriche. Le paysage de cette région, en mode réel autant que virtuel, est à couper le souffle. Je me sers essentiellement de FSX pour l’instant, mais surveille constamment l’évolution de la plateforme de simulation de vol Aerofly FS2. Les nuages virtuels pour les trois photos proviennent de la compagnie REX Simulations et le moteur météo utilisé pour l’occasion est FSGRW.
Le MD-11 est un aéronef virtuel extrêmement intéressant à piloter en simulation de vol mais il semble que la compagnie PMDG n’apporte plus de modifications à l’appareil pour lui permettre de suivre l’évolution des plateformes d’exploitations de Microsoft. Il n’est pas non plus modifié pour fonctionner avec P3D ou d’autres plateformes de vol virtuel. Il suffirait pourtant que des clients démontrent leur intérêt ( https://www.facebook.com/pmdgsimulations ) pour l’appareil pour que PMDG se donne la peine de modifier son MD-11 pour les nouvelles plateformes.
Dommage, car la documentation offerte par la compagnie est tout ce qu’il y a de plus complet et tous les articles en couleur de la revue PC Pilot expliquant comment voler l’avion sont encore disponibles aujourd’hui en un seul téléchargement PC Pilot Special Issue MD-11.
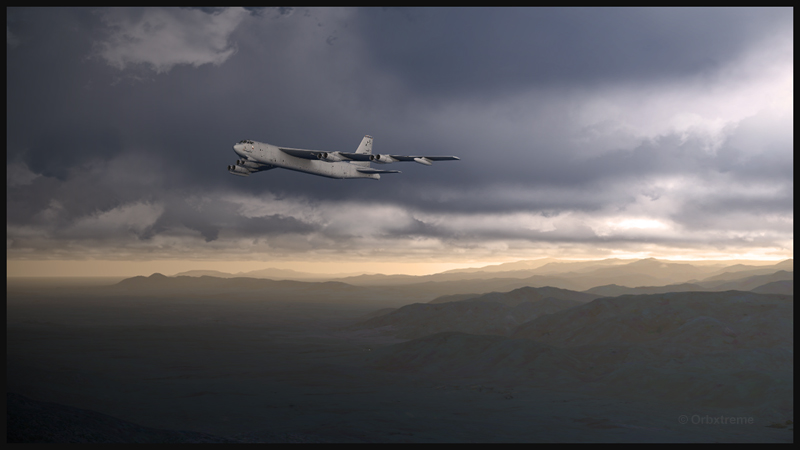
Voici quelques captures d’écran modifiées d’un vol virtuel effectué récemment avec le B-52 de la compagnie Captain Sim.
B-52 virtuel de la compagnie Captain Sim dans le sud de la Californie
Naturellement, la qualité élevée du paysage à l’arrière-plan et des nuages bien modélisés contribuent à rendre les captures d’écran plus réalistes. La plateforme de simulation de vol utilisée est FSX. Les textures de nuages proviennent de la compagnie REX Simulations.
Les paysages sont une création de la compagnie ORBX. En ce qui concerne les trois photos, les produits ORBX utilisés étaient FTX Global Base Pack, FTX Global Vector, FTX Global Open LC North America, FTX Global Trees HD et NA Southern California. La période de la journée utilisée dans FSX était tôt le matin.
Nuages virtuels de la compagnie REX et plateforme de simulation de vol FSX
Quelques modifications au moyen de Photoshop ont été effectuées dans la photo ci-dessous pour donner une sensation de vitesse au B-52. Quand il s’agit de traiter une capture d’écran d’un aéronef virtuel avec un logiciel de traitement de l’image, les mêmes règles qu’avec une photo normale s’appliquent : la modération donne de meilleurs résultats.
Le B-52 virtuel à haute vitesse et basse altitude dans le sud de la Californie
Le son émis par les huit moteurs du B-52 de Captain Sim est assez impressionnant. C’est un avion qui, malgré la puissance énorme offerte pour le décollage, exige que l’on suive les procédures à la lettre sinon il ne lève tout simplement pas. Un parachute peut être déployé à l’atterrissage pour l’effet visuel, mais le simulateur de vol ne tient pas compte de sa présence pour calculer la distance requise pour le freinage.