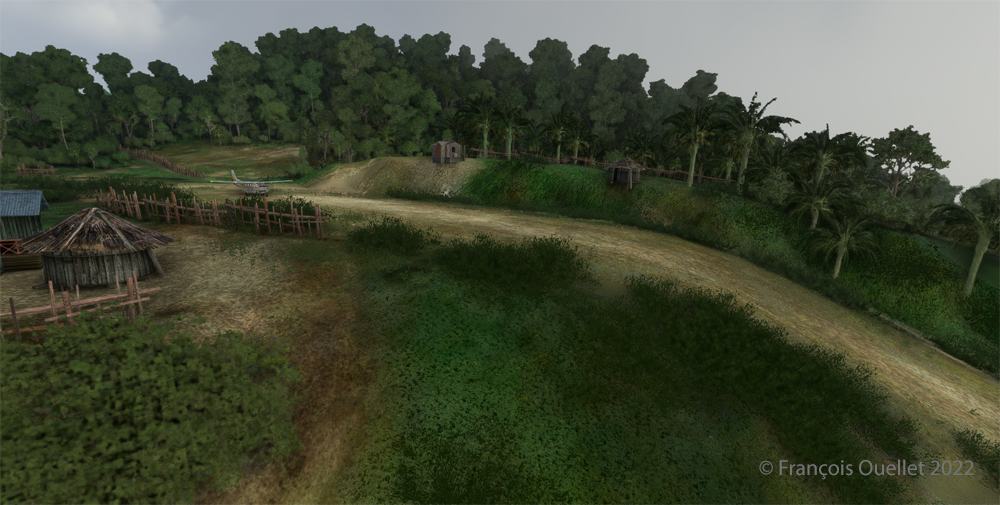
La piste de Bugalaga en Indonésie photographiée par Nico Sanchez.
On peut classer les décollages et atterrissages sur la piste de Bugalaga (WX53) en Indonésie comme étant dans la catégorie des vols virtuels exigeants. La piste ne présente pas un défi extraordinaire, du fait de ses dimensions tout de même confortables de 1478 pieds par 75 pieds de large. Mais l’approche requière tout de même plus de doigté qu’une approche standard, surtout avec les arbres en finale et la forte pente.
Le vol d’aujourd’hui avec le simulateur de vol MSFS 2020 consiste à décoller et atterrir sur cette piste en pente. Pour ajouter au plaisir, le vol doit se faire durant des conditions météorologiques adverses. En effet, les orages programmés dans la météo virtuelle compliquent un peu plus la tâche du pilote virtuel, car il doit composer avec des rafales de vent et de la turbulence mécanique. Et pour ajouter au plaisir, le Pilatus normalement utilisé est remplacé par un Cessna Grand Caravan 208B. La photo ci-dessus représente la piste de Bugalaga dans la réalité.
La piste en pente de Bugalaga (WX53) avec le simulateur de vol MSFS 2020.
Ci-dessus, l’interprétation graphique en virtuel de cette piste située à 6233 pieds au-dessus du niveau de la mer (MSL) avec le Cessna prêt à décoller. Asobo (Microsoft) a fait du bon boulot.
Cessna Grand Caravan 208B prêt pour le départ de la piste en pente de Bugalaga avec MSFS 2020
La visibilité pourrait être meilleure, mais elle n’empêche pas le décollage de l’aéronef sur la piste 06.
Cessna Grand Caravan 208B au décollage de Bugalaga (WX53) avec MSFS 2020.
Comme vous pouvez le constater, la marge d’erreur est mince pour cet aéronef moins performant que le Pilatus habituellement utilisé dans la réalité.
Orage en approche pour Bugalaga en simulation de vol.
Immédiatement après le décollage, la préparation commence pour la procédure en éloignement et le virage à 180 degrés qui remettra l’aéronef en finale pour la piste 24. Les montagnes environnantes présentes requièrent toute l’attention du pilote.
Cessna Grand Caravan 208B en approche pour Bugalaga en simulation de vol.
Une visibilité acceptable mais de forts vents caractérisent l’approche vers Bugalaga.
La piste en pente virtuelle de Bugalaga est visible dans les montagnes.
La piste 24 devient progressivement visible dans les montagnes.
En finale pour Bugalaga (WX53) avec le simulateur de vol MSFS 2020.
La vitesse avec volets sortis se situe autour de 82 nœuds.
Atterrissage sur la piste en pente de Bugalaga (WX53) avec MSFS 2020.
Le Cessna Grand Caravan C208B s’apprête à toucher le sol. On peut voir la forte pente de la piste, qui s’accentue encore davantage vers la fin du trajet.
Cessna Grand Caravan 208B sur la piste de Bugalaga en Indonésie.
Une fois atterri, le pilote virtuel doit conserver suffisamment de vitesse pour gravir la butte en fin de piste.
Cessna Grand Caravan 208B après un atterrissage à Bugalaga en simulation de vol.
Une dernière capture d’écran montrant l’aéronef ayant franchi la dernière butte à la fin de la piste 24. Le vol est de courte durée, mais nécessite toute votre attention. Bonne chance à ceux qui tenteront l’expérience!
Un DHC-3 de la compagnie Air Saguenay a réussi à faire le voyage entre le Québec et Kokoda en Papouasie Nouvelle-Guinée. Il travaillera dans le secteur, sur les différentes pistes en montagne, durant plusieurs mois.
Le Otter d’Air Saguenay circule pour la piste de Kokoda en direction de Launumu en Papouasie Nouvelle-Guinée.
Aujourd’hui, le Otter se dirige vers Launumu, une piste en montagne dont l’élévation est de 5082 pieds asl et qui a une longueur de 1200 pieds.
Le Otter d’Air Saguenay au départ de Kokoda.
Il faut surveiller les oiseaux pour éviter les collisions en vol.
Avion Otter et oiseaux.
Une bonne façon d’atteindre Launumu est de suivre le sentier de Kokoda.
Le Otter dans les montagnes de la Nouvelle-Guinée, suivant la piste de Kokoda.
Si le mélange air/essence n’est pas bien ajusté, l’aéronef perdra de la puissance en tentant de franchir certaines montagnes dont le sommet culmine autour de 7500 pieds.
Tableau de bord du Otter avec le mélange air/essence ajusté.
Tout pilote atterrissant ou quittant Launumu doit composer avec une haute altitude densité. Ce n’est pas seulement dû à l’élévation de la piste, mais aussi à la présence d’air chaud et humide dans la région. En conséquence, une vitesse un peu plus élevée sera nécessaire au moment de l’arrivée et du départ. La piste de Launumu est en vue.
La piste de Launumu est en vue.
Lorsqu’un pilote atterri en direction sud-ouest sur la piste de Launumu, en provenance de Kokoda, il doit plonger dans la vallée pour perdre de l’altitude. Cela aura pour conséquence d’accroître la vitesse de l’appareil.
Si la vitesse n’est pas promptement corrigée, l’approche pour la piste de Launumu se fera à une vitesse trop élevée. Toute vitesse en haut de 60 nœuds forcera le pilote à effectuer une approche manquée (à moins que vous soyez prêt à mourir virtuellement quelques fois en tentant de forcer l’approche).
Perte d’altitude en respectant la limite des volets.
Donc, une fois les plus hautes montagnes franchies, une bonne façon de perdre de l’altitude sans gagner de vitesse est d’utiliser les volets et de faire un virage serré de 360 degrés tout en descendant. De cette façon, le pilote terminera le virage en ligne avec la piste et à la vitesse désirée, qui se situe autour de 50 nœuds.
Virage en descente dans la vallée pour une approche vers Launumu.
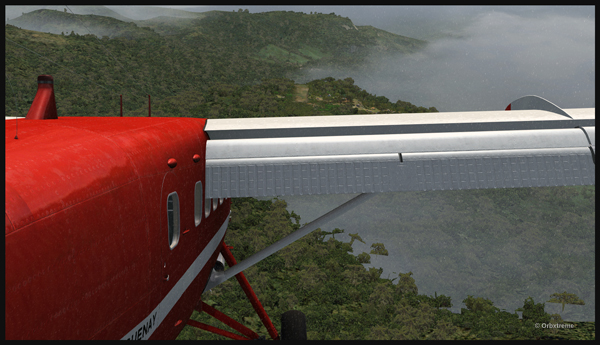
Le Otter plane longuement grâce à ses immenses ailes.
Le Otter d’Air Saguenay en approche pour la courte piste de Launumu en Papouasie Nouvelle-Guinée.
En finale pour la piste de Launumu, le pilote devra composer avec quelques arbustes en finale. Il n’est pas inhabituel pour un Otter ou un Beaver de compléter une approche difficile avec quelques plantes vertes enroulées autour du train d’atterrissage.
Le Otter d’Air Saguenay en finale pour la piste en montagne de Launumu.
Arrivée d’un avion de type Otter sur la piste en altitude de Launumu.
Launumu offre une surprise aux nouveaux arrivants. Si le pilote atterri en direction sud-ouest, comme cela est fait ici, et qu’il n’immobilise pas l’avion en-dedans d’approximativement 600 pieds, l’aéronef recommence à accélérer à cause de la pente prononcée dans la deuxième partie de la piste. Cette pente mène à une falaise. En cas d’approche manquée, le pilote peut utiliser la pente descendante pour plonger dans la vallée en fin de piste et ainsi accroître la vitesse de l’appareil et débuter une nouvelle approche.
Maintenant que le travail difficile est fait, il suffit d’attendre les passagers et la cargaison et de planifier le prochain vol!
Un aéronef Otter remonte la piste à rebours après un atterrissage sur la piste en pente de Launumu.
Avion de type Otter stationné sur la piste de Launumu en Papouasie Nouvelle-Guinée.
La scène virtuelle a été conçue par Ken Hall et Tim Harris.
Les paysages et les nuages virtuels ont nécessité les programmes virtuels tels que REX, REX Texture Direct, Cumulus X, FTX Global, FTX Global Vector et Pilot’s FS Global 2010.
Tout est maintenant prêt! Le premier planeur est arrivé à l’aéroport de Fane Parish en Papouasie Nouvelle-Guinée …
Planeur sur la courte piste en gazon et en pente de Fane Parish en Papouasie Nouvelle-Guinée.
Avant que ce soit officiellement offert en tant qu’attraction touristique pour la région, quelques essais de décollage et atterrissage doivent être effectués. Le premier essai attire quelques curieux!
Avion et planeur sur la piste en montagne de Fane Parish.
La descente le long de la piste en pente de 12 degrés secoue un peu et le devant des ailes est un peu égratigné. Certains petits buissons devront être élagués!
Un aéronef tire un planeur au décollage de la piste en pente de Fane Parish en Papouasie Nouvelle-Guinée.
La météo est superbe et la température très chaude. Le seul problème potentiel est la montagne droit devant.
Planeur tiré par un avion après le décollage de la piste en montagne de Fane Parish.
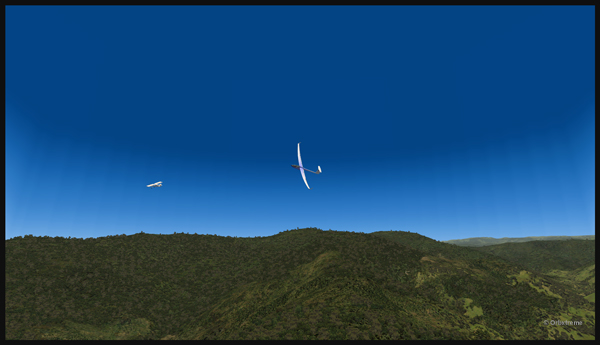
Le pilote coupe finalement le lien. Il est libre d’explorer les environs!
Lien coupé entre l’avion et le planeur après le décollage de Fane Parish.
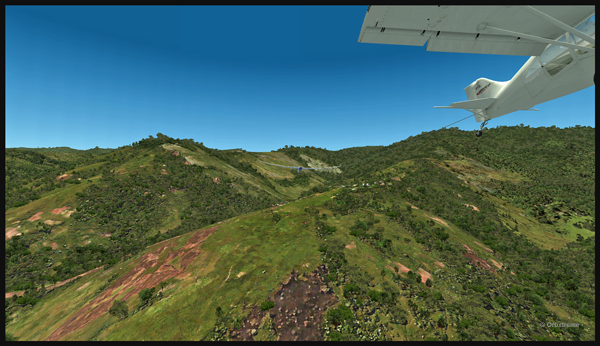
Le planeur survole silencieusement la jungle de la Papouasie Nouvelle-Guinée.
Survol du territoire de la Papouasie Nouvelle-Guinée avec un planeur virtuel (FSX)
Utilisant les courants d’air chaud, le planeur gagne en altitude.
Le planeur prend de l’altitude.
Pourquoi pas un survol du village de Fane?
Survol du village de Fane Parish avec un planeur virtuel.
Et voici un autre village isolé le long de la montagne.
Vol avec planeur virtuel au-dessus d’un village isolé de Papouasie Nouvelle-Guinée
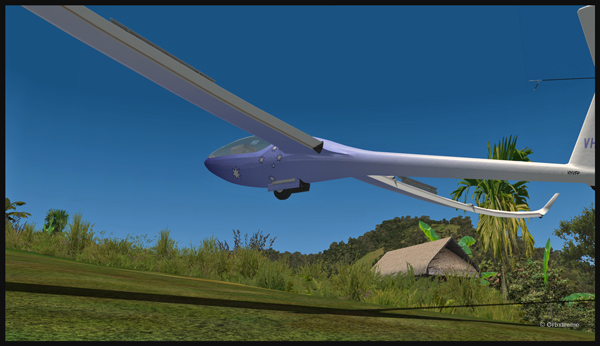
Un dernier virage serré pour débuter l’approche vers Fane Parish.
Dernier virage serré pour un atterrissage court sur la piste en pente de Fane Parish
Les aérofreins sont sortis et la vitesse est raisonnable. La piste en pente est juste devant, sur le sommet de la montagne de droite.
Approche d’un planeur pour la piste en terrain élevé de Fane Parish en Papouasie Nouvelle-Guinée. La vitesse est appropriée et l’angle est bon.
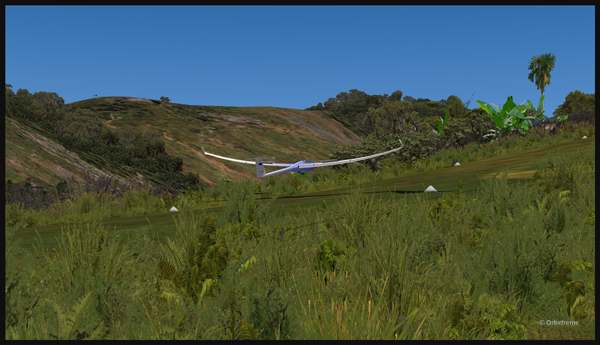
Il faut conserver juste assez d’altitude pour être certain de se rendre jusqu’à la piste.
Planeur en approche pour la piste en pente de 12 degrés de l’aéroport de Fane Parish.
Maintenant que l’atterrissage est assuré, il est temps d’utiliser les aérofreins pour ralentir le planeur.
Planeur virtuel arrivant au-dessus de la piste de Fane Parish en Papouasie Nouvelle-Guinée. Les aérofreins sont sortis.
Étant donné que cette piste d’atterrissage en altitude a une bonne pente, il est préférable de conserver un peu de vitesse. Aucun pilote n’apprécie un décrochage à quelques pieds au-dessus de la piste.
Planeur virtuel avec aérofreins au-dessus de la piste de Fane Parish
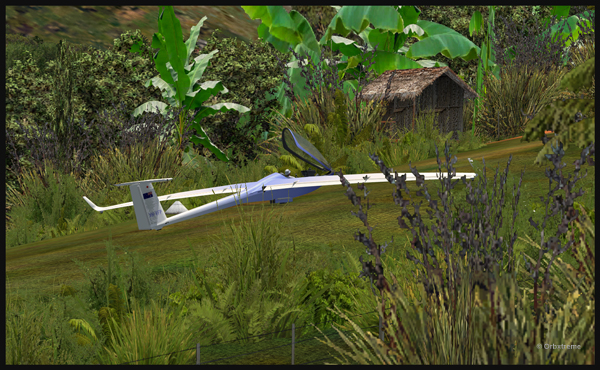
Quelle expérience! Mais le pilote aura besoin d’aide pour remonter le planeur le long de la pente!
Planeur sur la piste de Fane Parish
Le vol était superbe, la vue en valait vraiment la peine. Je pense que cette activité de planeur pourrait devenir une attraction touristique pour la région et les visiteurs plus fortunés …
Planeur atterri sur la piste de l’aéroport de Fane Parish en Papouasie Nouvelle-Guinée
La scène virtuelle est une création de Ken Hall et Tim Harris pour la compagnie ORBX.
Faire un atterrissage virtuel en manuel à Innsbruck (ICAO : LOWI) avec un très gros porteur comme le MD -11F amusera tout amateur de simulation de vol. Depuis que l’aéroport et les environs d’Innsbruck ont été modélisés sous ORBX Innsbruck, la sensation d’immersion est totale. Le paysage est à couper le souffle.
Le MD-11F virtuel de Martinair Cargo au décollage de la piste 26 de l’aéroport de Innsbruck (LOWI)
Commencez par décoller de la piste 08, en décoiffant certainement un peu les observateurs qui se trouveraient en bout de piste. Il faut ensuite prendre suffisamment d’altitude pour pouvoir effectuer un virage de 180 degrés dans le but de vous réaligner sur la piste 26.
Un MD-11F de PMDG se prépare pour une approche visuelle piste 08 à Innsbruck
Il faut s’assurer d’activer la fonction « turbulence » de votre moteur météo virtuel, car l’approche près des montagnes génère généralement de la turbulence qui peut rendre l’approche plus difficile. Le pilote virtuel doit également composer avec les vents du moment, même s’ils ne favorisent pas la piste 26.
MD-11F virtuel de Martinair Cargo en approche pour l’aéroport d’Innsbruck (LOWI)
Les volets doivent être réglés à 50 degrés pour le MD-11F. La fonction « Autopilot » doit être à « OFF ». L’ajustement de l’intensité du freinage automatique se fait en fonction des vents du moment et du poids que vous avez choisis pour l’appareil pour un atterrissage sur un aéroport situé à 2000 pieds d’altitude. La marge de manœuvre quant à la vitesse d’approche n’est pas très grande. J’ai tenté de maintenir environ 150 KTS.
Le MD-11F virtuel de PMDG avec 50 degrés de volets en finale pour la piste 08 à Innsbruck
La piste d’Innsbruck est longue de 2000 mètres . Il n’y a pas beaucoup de réserve pour un MD-11F.
Arrivée du MD-11F virtuel conçu par PMDG sur la piste 08 à Innsbruck
MD-11F virtuel conçu par PMDG en freinage piste 08 à Innsbruck
Une fois au sol, il faut continuer jusqu’au bout de la piste 26 pour pouvoir effectuer un virage de 180 degrés. Il y a juste assez d’espace pour le MD-11F.
MD-11F virtuel de Martinair Cargo remonte la piste 08 après l’atterrissage à Innsbruck
Comme vous pouvez le constater dans l’image ci-dessous, en regardant la manche à vent, l’atterrissage s’est fait par un bon vent trois quarts arrière.
MD-11F virtuel de Martinair Cargo quitte la piste de l’aéroport d’Innsbruck
L’aéroport est superbement modélisé et une place de stationnement est déjà réservée pour les très gros porteurs. Des employés sont en place et attendent votre arrivée.
Aéroport d’Innsbruck virtuel et MD-11F de Martinair Cargo
MD-11F virtuel conçu par PMDG stationné à l’aéroport d’Innsbruck en Autriche
MD-11F virtuel de Martinair Cargo stationné à l’aéroport de Innsbruck
Vous pouvez tenter l’expérience avec tout autre gros porteur si vous ne possédez pas déjà un MD -11 virtuel de la compagnie PMDG. Si toutefois vous désirez acquérir cet aéronef virtuel, vous constaterez qu’il ne semble plus offert, pour le moment, par la compagnie PMDG. Tentez de faire pression auprès de cette compagnie pour qu’elle offre de nouveau cet appareil sur lequel elle a mis tant d’heures de travail. Un message sur leur site Facebook devrait leur montrer votre intérêt : https://www.facebook.com/pmdgsimulations
Si vous désirez voir un vidéo exceptionnel de plus de deux heures sur un voyage réel de dix jours à travers le monde effectué par Lufthansa Cargo avec un MD-11 F, il n’y a rien de mieux que le produit offert par la compagnie PilotsEYE.tv : Lufthansa Cargo MF-11F in Quito
DVD de PilotsEye sur un voyage de 10 jours à travers le monde avec un MD-11F de Lufthansa Cargo
La préparation de l’équipage pour un atterrissage difficile sur l’ancienne piste de Quito, Équateur, est remarquable. L’altitude de l’aéroport fait en sorte que le MD -11F opère alors à la limite de ses capacités. Assurez-vous de posséder un lecteur pouvant décoder les vidéos européens.
La cause des délais et les avantages pour le consommateur
Le jet régional virtuel de Bombardier CRJ-900ER (Aerosoft) portant les couleurs de la compagnie Alaska Airlines est en montée dans la région de Valdez en Alaska (ORBX)
Digital Aviation & Aerosoft ont finalement réussi à compléter leur projet de créer les aéronefs virtuels CRJ-900ER et CRJ-700ER de Bombardier. Après des mois de retard, les enthousiastes de simulation de vol peuvent enfin se réjouir. Le CRJ est surtout utilisé pour faire la liaison entre les aéroports et régions un peu plus éloignées et les grands centres. Il atteint rapidement son altitude de croisière et peut y rester longtemps, mais il n’est pas conçu pour être un aéronef très rapide.
La compagnie explique que dès le départ, elle a sous-estimé la complexité du projet et, à cause des délais encourus, s’est finalement fait rattraper par la compétition. Afin d’offrir un produit supérieur, elle a dû revoir ce qui était considéré comme presque terminé pour l’améliorer encore davantage avant la mise en marché.
Avion virtuel CRJ-700ER (Aerosoft) de la compagnie aérienne Alaska Airlines au décollage de l’aéroport virtuel de Valdez (ORBX)
Avec le CRJ-700ER et le CRJ-900ER, le consommateur peut d’ores et déjà bénéficier d’aéronefs dont l’extérieur a été complètement revu par rapport à ce qui était initialement prévu. Le directeur de projet indique que ce n’est que grâce aux encouragements et aux appuis de la communauté des amateurs de simulation de vol que la compagnie a décidé de compléter le projet, malgré les retards et les coûts additionnels.
Le premier vol avec le CRJ
Aéronef virtuel CRJ-900ER de la compagnie Air Nostrum au départ de l’aéroport virtuel de St-Martin (Fly Tampa St.Maarten)
Pour le premier vol, le manuel recommande de sélectionner et activer d’abord un des avions initialement fournis avec FSX, avec le moteur déjà démarré. Ensuite, le pilote virtuel sélectionne le CRJ de son choix. Cela évitera, selon les dires de la compagnie, de multiples problèmes.
Cockpit virtuel 2D
Le fait que le cockpit virtuel soit en 2D permet certainement de sauver quelques FPS. L’accès aux boutons et commandes à l’intérieur du cockpit est simplifié par l’usage des chiffres de 1 à 9 sur le clavier, chaque chiffre donnant un accès immédiat à la section choisie du tableau de bord et des commandes.
Navigation
Le pilote virtuel a accès à la base de données NavDataPro pour la navigation aérienne. Il s’agit de la base de données la plus utilisée dans le monde pour la navigation dans les aéronefs. Cependant, il y a possibilité d’utiliser Navigraph, pour ceux qui connaissent déjà ce logiciel.
Demande sur les processeurs de l’ordinateur
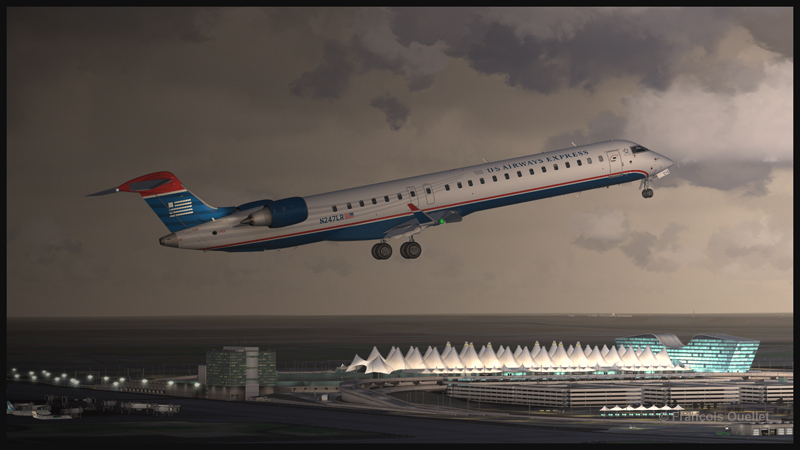
Avion virtuel CRJ-900ER (Aerosoft) de la compagnie U.S. Airways au décollage de l’aéroport virtuel de Denver (Flightbeam Studios)
J’ai opéré les appareils sur différents aéroports virtuels tels que St. Maarten (Fly Tampa St. Maarten), Montréal international (Fly Tampa Montreal), Denver international (Flightbeam Studios) et Valdez (ORBX) sans éprouver d’ennuis quant aux processeurs du simulateur de vol. Il était hors de question de tenter d’utiliser l’aéroport de Courchevel (LLH Creations), à cause de sa trop courte piste en pente, mais le survol à basse altitude et haute vitesse n’a causé aucun problème quant aux FPS.
Un avion virtuel CRJ-700ER (Aerosoft) de la compagnie Air France HOP est en vol au-dessus de l’aéroport virtuel de Courchevel en France (LLH Creations)
Pilotage à basse vitesse
Le CRJ offre une bonne marge de manœuvre quant au pilotage à basse vitesse. Cependant, dû au positionnement des moteurs, le nez de l’avion se soulève rapidement lorsque la manette des gaz est ramenée à zéro. Dans une descente progressive, cela ne cause pas de problème, mais si la manœuvre est faite en courte finale, alors que l’avion est encore au-dessus de 50 pieds, le nez se soulèvera rapidement et la vitesse baissera considérablement, ce qui peut provoquer un décrochage.
Les aérofreins
Il ne faut pas trop compter sur les aérofreins pour ralentir le CRJ. Ils sont d’une efficacité limitée, autant dans la vraie vie que dans le vol virtuel.
Tendance au flottement
Si l’avion se présente un peu au-dessus de la vitesse recommandée au-dessus du seuil de piste, il flotte sur une longue distance avant de finalement entrer en contact avec la piste.
Distance de décollage et d’atterrissage
Un avion virtuel CRJ-900ER de la compagnie Air Canada (Aerosoft) est en approche pour l’aéroport international Pierre-Elliott-Trudeau de Montréal (Fly Tampa Montréal)
Le CRJ se satisfait de pistes relativement courtes pour ses opérations. Le CRJ-700 nécessite 5040 pieds pour le décollage (poids maximal) et l’atterrissage (poids maximal autorisé), dans des conditions atmosphériques standard. Le CRJ-900 a, quant à lui, besoin de 6060 pieds pour le décollage et de 5260 pieds pour l’atterrissage. La distance pouvant être couverte se situe entre 1300 et 1400 nm.
Programmes faciles à utiliser
Pour le CRJ, Digital Aviation & Aerosoft ont conçu des gestionnaires qui permettent de choisir le nombre de passagers désirés et le cargo, de même que de calculer le poids en carburant, le centre de gravité et le montant de compensateur nécessaire pour le décollage. Il y a même une fonction FS2 Crew si désirée. Un autre gestionnaire facilite l’installation de nouvelles couleurs de compagnies.
L’arrivée de ce jet régional dans le monde de la simulation de vol était attendue depuis longtemps; certains n’y croyaient plus, incluant les gens de Digital Aviation & Aerosoft eux-mêmes. Les amateurs vont enfin pouvoir mettre la main sur un jet régional virtuel de grande qualité et de classe mondiale.
Pour d’autres articles dans la catégorie “Simulation de vol”, cliquez sur le lien suivant : Simulation de vol
L’amateur de simulation de vol aura du plaisir à tenter ce court vol (14 minutes) entre l’aéroport virtuel de Eagle County (KEGE) et l’aéroport virtuel de Telluride (KTEX). Le vol virtuel, sous FSX, a été effectué durant l’hiver, plus précisément le 8 janvier (pour ceux qui voudraient répéter l’expérience). Les photos ci-dessous représentent une idée de ce qu’il est possible d’observer en route pour Telluride. Une altitude de 14,000 pieds devrait suffire….
MD-11 de FedEx roule à l’aéroport d’Eagle County (KEGE) (FSX)
MD-11 de FedEx au décollage de l’aéroport de Eagle County (KEGE) (FSX)
MD-11 de FedEx en route de Eagle County airport (KEGE) vers Telluride (KTEX) (FSX)
Il y a beaucoup de belles montagnes entre KEGE et Telluride, et aussi une météo passablement imprévisible…
MD-11 de FedEx entre l’aéroport de KEGE et celui de KTEX (FSX)
Le plafond prévu à Telluride était de 8500 ft. En route vers l’aéroport, les nuages et la visibilité obscurcissaient parfois les montagnes.
MD-11 de FedEx sur un trajet Eagle County (KEGE) Telluride (KTEX) (FSX)
Telluride est un aéroport invitant pour un MD-11. La piste de 7000 pieds ne représente pas un grand défi, même si avec sa largeur de 100 pieds elle demeure un peu étroite : cet avion exige normalement une piste d’atterrissage de 150 pieds de large.
L’approche VFR virtuelle faite avec le MD-11 constituait la façon la plus dispendieuse de faire le voyage étant donné qu’elle exigeait un vol par le travers de Telluride suivi d’un virage de 270 degrés vers la droite pour un alignement piste 09.
MD-11 de FedEx passe par le travers de l’aéroport de Telluride (KTEX) (FSX)
Le virage de 270 degrés a été effectué avec un angle variant entre 10 et 20 degrés pendant que l’altitude passait de 14,000 à 10,000 pieds de façon à éviter toute manœuvre radicale. Pendant le virage et la descente, la vitesse a progressivement été réduite à 160 kts. Le MD-11 était maintenant établi en finale avec les volets réglés à 50 degrés.
Un MD-11 de FedEx en longue finale piste 09 pour l’aéroport de Telluride (KTEX) (FSX)
La piste d’atterrissage en altitude de 9078 pieds au-dessus du niveau de la mer signifiait que le pilote devait considérer une densité de l’air plus faible et ajuster la vitesse de l’appareil en conséquence pour éviter un décrochage en finale.
Un MD-11 de FedEx en finale piste 09 pour l’aéroport de Telluride (KTEX) (FSX)
Voici une vue à partir de la tour de Telluride…
Vue à partir de l’aéroport de Telluride (KTEX) (FSX) d’un MD-11 de FedEx en finale piste 09
Avec une vue comme celle-là, pas question d’arriver en mode IFR…!
Un MD-11 de FedEx en provenance de KEGE en finale pour l’aéroport de Telluride (KTEX) (FSX)
De façon à prévenir une approche manquée et des dépenses supplémentaires en carburant (qui étaient déjà anormalement élevées), une approche optimale était requise.
La plupart des accidents impliquant un MD-11 se produisent lorsque le pilote pousse sur le manche lorsqu’il y a un rebond de la roue avant, créant ainsi un rebond supplémentaire encore plus prononcé. Lorsqu’il y a un rebond, il n’est pas nécessaire d’appuyer sur le manche : il suffit d’attendre que l’avion se stabilise et la roue de nez redescendra d’elle-même rapidement.
Un MD-11 de FedEx au-dessus du seuil de piste 09 à l’aéroport de Telluride (KTEX) (FSX)
C’est le moment du freinage maximal et des inverseurs de poussée…
Un MD-11 de FedEx en freinage piste 09 à l’aéroport de Telluride (KTEX) (FSX)
Le MD-11 peut facilement quitter la piste à la première voie de circulation à Telluride. Mais dans le but de capturer une meilleure vue de l’aéroport, j’ai utilisé la dernière voie de circulation (ajoutant encore un peu aux dépenses extravagantes en carburant)…
Un MD-11 de FedEx quitte la piste 09 à l’aéroport de Telluride (KTEX) (FSX)
L’employé sur la rampe semble se demander si l’aile du MD-11 risque d’accrocher le jet d’affaires N900SS en circulant. Mais il y avait suffisamment d’espace (environ 11 pouces!).
Un MD-11 de FedEx circule sur la rampe à l’aéroport de Telluride (KTEX) (FSX)
Le MD-11 a été stationné temporairement à un endroit privilégié de l’aéroport. Il a été nécessaire de décharger rapidement le précieux cargo et dégager l’aire de ravitaillement.
Stationnement temporaire improvisé pour un MD-11 de FedEx à l’aéroport de Telluride (KTEX) (FSX)
De l’aide de professionnels sera requise pour aider à déplacer le MD-11 et le ramener vers la piste. Mais cela est le problème du gestionnaire de l’aéroport qui a promis d’avoir l’équipement nécessaire au moment des communications avec FedEx!
MD-11 de FedEx stationné à l’aéroport de Telluride (FSX)
La scène virtuelle, du départ jusqu’à la destination, est une création des programmeurs de la compagnie ORBX. Le MD-11 virtuel provient de PMDG Simulations (je ne suis pas certain que l’appareil fonctionne sous P3D). Le moteur météo est conçu par REX Simulations, qui est également le fournisseur des textures de nuages, en combinaison avec Cumulus X. (Edit: le MD-11 n’est plus supporté par PMDG).
Pour d’autres vols virtuels exigeants, dirigez-vous vers la section « simulation de vol » de mon site web, sous « vols virtuels exigeants ».
Pour d’autres articles dans la catégorie “Simulation de vol”, cliquez sur le lien suivant : Simulation de vol