Décollage de l’aéroport virtuel d’Ivalo (EFIV) dans le nord de la Finlande.
La cinquième étape de ce tour du monde en simulation de vol se poursuit avec un voyage entre l’aéroport d’Ivalo (EFIV) en Finlande jusqu’à l’aéroport de Molde (ENML) dans le sud de la Norvège. La lumière du jour passe difficilement à travers la couche nuageuse au moment du décollage.
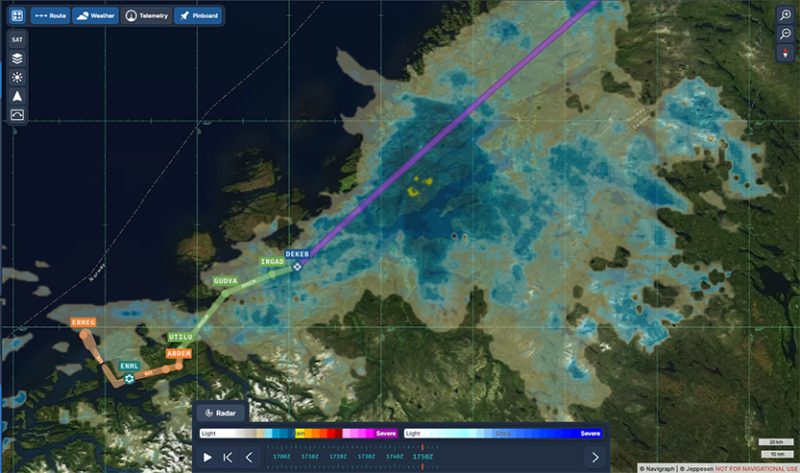
En prévision du présent trajet et des vols subséquents, je me suis abonné à Navigraph de façon à rendre l’expérience encore plus immersive. La carte ci-dessous montre les choix pour les procédures d’arrivée à l’aéroport de Molde. En vert se trouvent les points de compte-rendu pour l’arrivée et en orange ceux qui concernent l’approche. L’avion suit ces points automatiquement grâce à l’ordinateur de bord.
Informations de Navigraph pour l’arrivée à l’aéroport de Molde (ENML).
Je n’en suis qu’à la phase de familiarisation avec Navigraph et procède encore par essais et erreurs avec l’utilisation des données. Mais cela progresse…
En route vers l’aéroport de Molde (ENML) en Norvège avec MFS2020
Une fois passée la couche de nuages, l’appareil atteint finalement le niveau de vol FL380 (38,000 pieds).
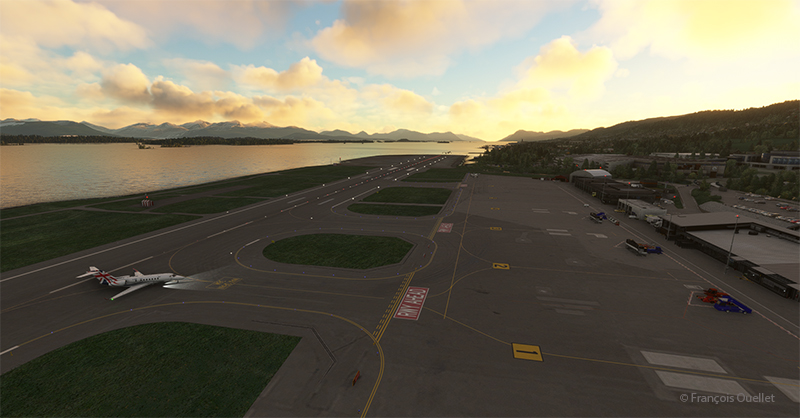
La piste de l’aéroport de Molde est d’une longueur de 2221 mètres (7287 pieds) et se trouve sur le rivage de Moldefjorden. Elle est parfaite pour le Cessna Citation Longitude, mais on doit tout de même tenir compte de la présence de montagnes en approche.
Une carte de Navigraph en superposition sur la géographie de la Norvège pour l’approche à l’aéroport de Molde (ENML).
Les données fournies par Navigraph aident le pilote à utiliser les bonnes limites d’altitude pour conserver une hauteur sécuritaire en tout temps par rapport au relief. On peut également suivre la progression de l’appareil le long de la route choisie. Plusieurs types de cartes sont aussi disponibles pour préparer les décollages et atterrissages.
Cessna Citation Longitude en descente pour l’aéroport de Molde (ENML) en simulation de vol.
On entame la descente pour l’aéroport de Molde. La couche nuageuse est relativement mince et la visibilité ne cause pas de problèmes.
En descente pour l’aéroport de Molde (ENML) en Norvège avec Microsoft Flight Simulator.
Le soleil couchant offre de très belles scènes au moment de la descente vers Molde.
En approche pour l’aéroport virtuel de Molde (ENML) avec le Cessna Citation Longitude.
Une fois sorti des nuages et la météo étant idéale, l’autopilote est débranché et l’approche s’effectue à vue.
En finale pour la piste 25 à l’aéroport virtuel de Molde (ENML) en simulation de vol.
Le Cessna Longitude se trouve maintenant en finale avec des vents qui ne causeront pas de problèmes pour l’approche.
Sortie de la piste 25 à l’aéroport de Molde (ENML) en Norvège.
Le Cessna Citation quitte la piste 25 et stationne pour quelques jours à Molde, cette ville de Norvège reconnue pour ses belles montagnes et ses nombreux parcs et jardins de roses. Cette ville a été sauvée de la famine en 1740 grâce à la présence du hareng. On retrouve donc sur les armoiries de la ville et en souvenir de cette époque une baleine qui chasse ce poisson dans un tonneau. Grâce à sa position le long des fjords et aussi à l’effet du foehn, les hivers à Molde sont relativement doux (et très doux si on les compare à ceux du Canada).
Bientôt, la sixième étape du vol aura lieu, de Molde vers Sandane (ENSD), un aéroport de Norvège entouré de superbes montagnes.
Décollage de l’aéroport virtuel d’Isafjordur (BIIS) en Islande avec Microsoft Flight Simulator.
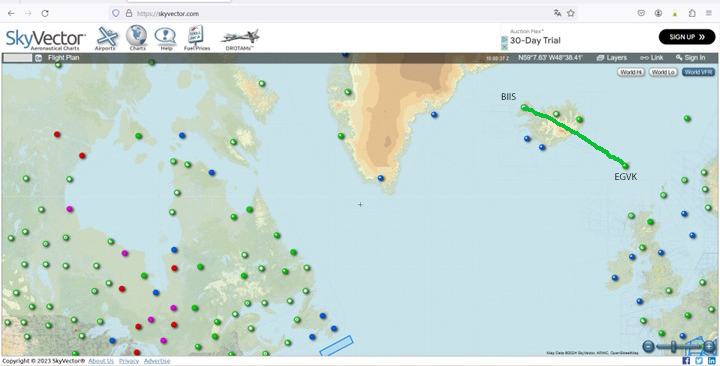
La troisième étape du vol autour du monde en simulation de vol commence par un départ d’Isafjordur (BIIS) en Islande et se termine à l’aéroport de Vagar (EKVG) dans les îles Féroé, cet archipel autonome qui appartient au Royaume du Danemark.
Le départ d’Isafjordur s’effectue face à une montagne. On voit d’ailleurs l’ombrage au sol. Mais la visibilité étant parfaite, cela ne cause aucun problème, en autant que le taux de montée est suffisant.
Vol virtuel BIIS EGVK
Le Cessna Citation Longitude au décollage de l’aéroport d’Isafjordur (BIIS) en Islande avec Microsoft Flight Simulator.
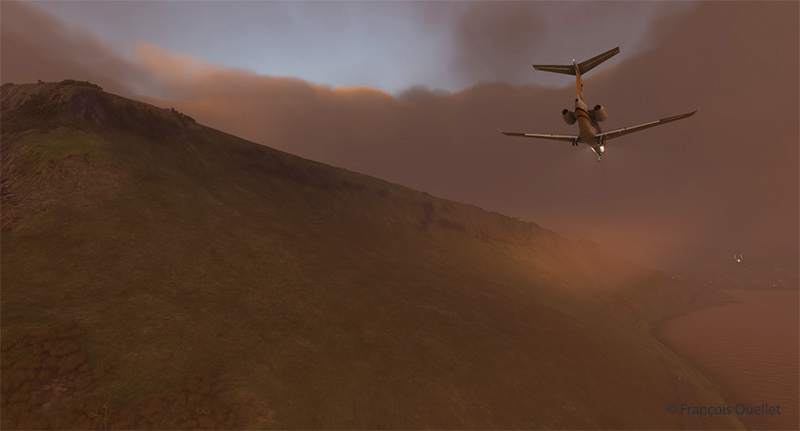
Un virage à gauche au-dessus du superbe relief de l’Islande permet d’établir le Cessna Citation Longitude sur la trajectoire vers les îles Féroé. Le FMS assure que l’appareil demeurera sur sa trajectoire. Mais il faut tout de même demeurer vigilant : il y a bien d’autres équipements qui peuvent occasionner des surprises en cours de route.
Le Cessna Citation Longitude en montée au-dessus de l’Islande.
La montée se continue au-dessus d’un magnifique paysage. Il n’y a aucune turbulence aujourd’hui; s’il y en avait, le simulateur de vol s’assurerait que l’avion soit plus difficile à contrôler, même pour le pilote automatique. J’ai réglé le vol virtuel pour observer le trafic aérien réel lors du vol, mais le trajet entre l’Islande et les îles Féroé se trouve en dehors des routes les plus populaires et il est donc normal de ne pas rencontrer trop d’appareils en route.
Le Cessna Citation Longitude se dirige vers l’aéroport de Vagar (EKVG) dans les îles Féroé.
Nous sommes maintenant établis à notre altitude de croisière et quittons la frontière Est de l’Islande pour survoler l’océan Atlantique.
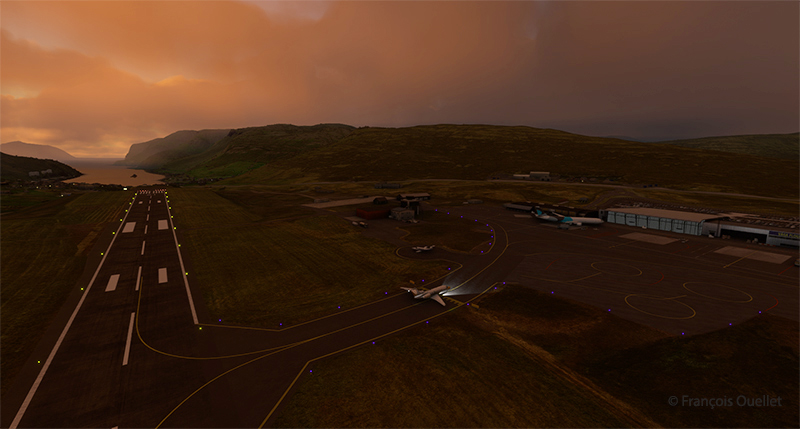
Approche visuelle pour la piste 12 de l’aéroport de Vagar (EKVG) dans les îles Féroé
On débranche le pilote automatique pour avoir les coudées franches lors de l’approche à l’aéroport visuelle à Vagar (EKVG). On peut voir au loin, droit devant, un petit point blanc que constituent les lumières de la piste 12. Le train d’atterrissage est sorti, les volets également, et la vitesse stabilisée autour de 140 nœuds pour l’instant.
Le Cessna Citation est en longue finale pour la piste 12 de l’aéroport de Vagar (EKVG) dans les îles Féroé
Il s’agit d’une heure idéale pour arriver aux îles Féroé, avec ce soleil couchant qui colore tous les nuages environnants.
Le Citation Longitude en approche pour la piste 12 de l’aéroport de Vagar (EKVG)
La piste 12 est visible à l’extrême-droite dans la photo ci-dessus. Le couvert nuageux inégal bloque parfois pour quelques secondes la vue sur l’aéroport, mais le vent chasse rapidement les nuages et permet d’éviter une approche manquée. La météo virtuelle assure un renouvellement constant des conditions météorologiques.
Le Cessna Citation sort de la piste 12 de l’aéroport de Vagar (EKVG) dans les îles Féroé avec Microsoft Flight Simulator
L’atterrissage se fait sans problèmes, la piste de Vagar étant suffisamment longue (5902 x 98 pieds) pour accommoder un tel jet privé.
Environ 53,000 personnes habitaient dans les îles Féroé en date de 2021. Une des activités les plus appréciées est l’observation des oiseaux et de la flore. Pour faciliter le déplacement des résidents et des touristes, des tunnels ont été construits entre certaines des 18 îles de l’archipel.
La quatrième étape autour du monde en vol virtuel se fera entre Vagar et Ivalo (EFIV) en Finlande. Il s’agit de l’aéroport le plus septentrional de ce pays.
Vue rapprochée de la région et de la piste d’atterrissage de Grosse-Île au Québec avec MSFS 2020.
Il aura fallu le simulateur de vol de Microsoft (MSFS 2020) pour que je découvre cette piste d’atterrissage sur Grosse-Île. Même le Supplément de vol du Canada (CFS–Canada Flight Supplement) de Nav Canada n’en parle pas.
Il y a plusieurs décennies, les autorités canadiennes utilisaient cette île située au milieu du fleuve St-Laurent comme lieu de quarantaine pour les immigrants arrivant au Canada. De nombreux Irlandais, entre autres, ont fait un arrêt obligé sur cette bande de terre avant d’obtenir l’autorisation de poursuivre leur périple au Canada.
Il fut un temps où une section de l’île était réservée aux chercheurs canadiens et américains pour leurs recherches très secrètes sur l’Anthrax. Le plus étonnant quand on lit l’article est de réaliser que toute la production de cette arme bactériologique (439 litres) a été mélangée avec du formaldéhyde et mise dans des barils jetés quelque part dans le fleuve St-Laurent quand on décida qu’elle ne serait plus utile, la Seconde Guerre mondiale ayant pris un tournant en faveur des Alliés. Il me semble que le formaldéhyde n’empêche par des barils de rouiller, mais bon… revenons à notre propos.
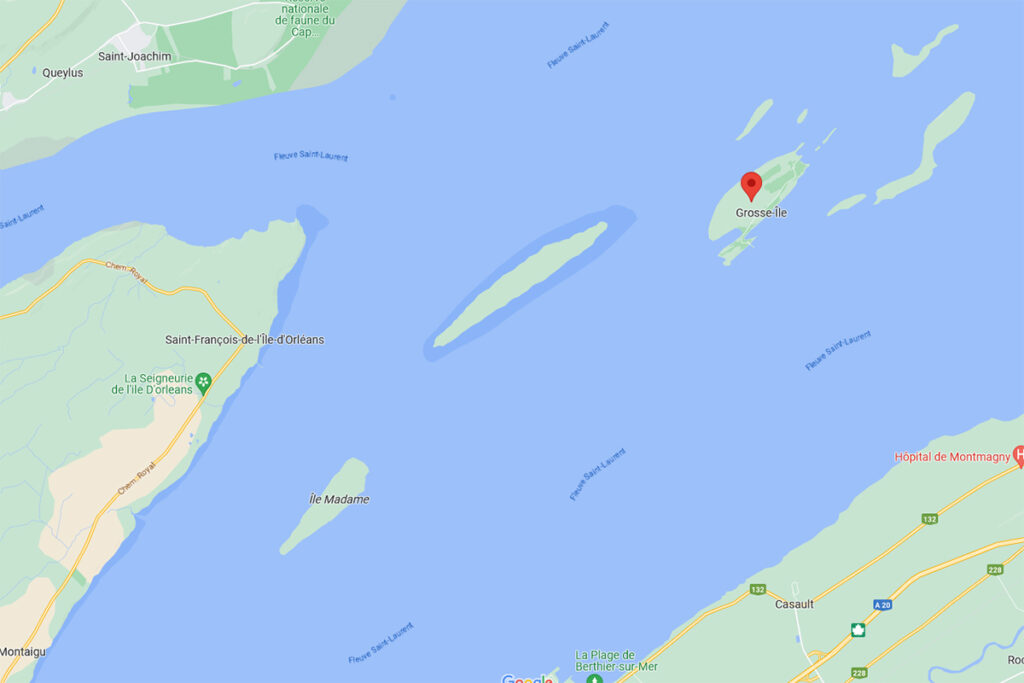
Où se situe Grosse-Île ? Dans la province de Québec, un peu à l’est de la ville de Québec. C’est l’une des nombreuses îles que l’on survole une fois l’Île d’Orléans derrière soi. Ci-dessous, une capture d’écran de Google Maps.
Grosse-Île au Québec sur Google Maps.
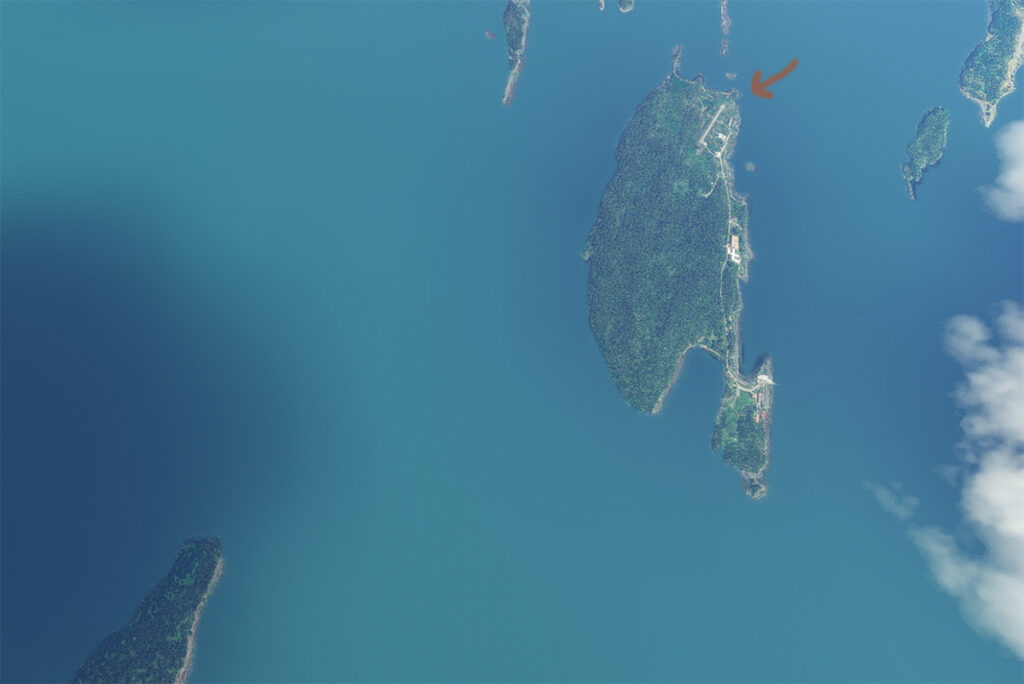
L’image satellitaire ci-dessous montre bien qu’il ne s’agit pas d’une invention. Microsoft désigne cette piste comme étant CYMN Montmagny : une erreur avec laquelle on peut facilement vivre, puisqu’en donnant un code officiel à cette piste de Grosse-Île, le pilote peut l’utiliser comme un point de navigation dans son GPS.
Vue satellitaire de Grosse-Île et sa piste d’atterrissage.
Utilisons donc un petit Cessna aux couleurs de la Coast Guard américaine pour effectuer un vol virtuel entre l’aéroport de Québec (CYQB) et Grosse-Île (CYMN). Il faisait un peu frisquet en cette journée de février à Québec, j’ai donc décidé de nous transporter en juillet pour ce vol, en y ajoutant au passage quelques nuages cumuliformes.
Au-dessus de la ville de Québec en direction de Grosse-Île.
Ce vol de courte durée nous permettra de survoler l’île d’Orléans, l’île Madame (propriété de Laurent Beaudoin, ancien actionnaire principal de Bombardier), l’île au Ruau (achetée en 2019 par le richissime propriétaire de l’empire Gildan) pour enfin arriver à Grosse-Île.
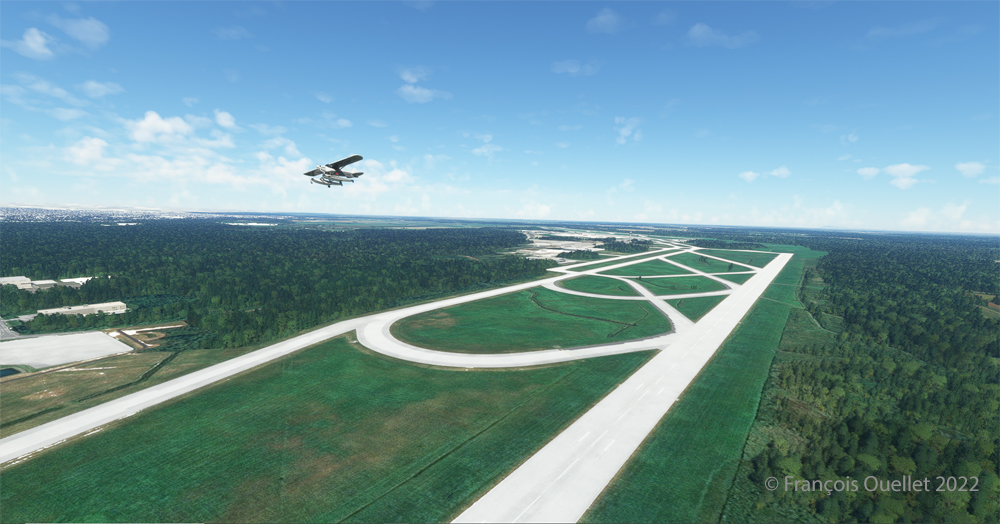
En approche pour Grosse-Île au-dessus du fleuve St-Laurent avec le simulateur de vol MSFS 2020.
La photo ci-dessous montre l’appareil établi en base droite pour la piste de Grosse-Île. Je ne connais pas les dimensions officielles de cette piste d’atterrissage en terre, mais elle ne cause aucun problème pour recevoir un avion de type Cessna tel que le nôtre.
Cessna en base pour la piste de Grosse-Île avec le simulateur de vol MSFS 2020.
Ci-dessous, l’aéronef est établi en finale pour la piste.
En finale pour la piste de Grosse-Île.
Une dernière capture d’écran montre le Cessna roulant sur la piste après l’atterrissage. Comme vous pouvez le constater, la piste peut accueillir des avions plus imposants. Si vous désirez effectuer un vol-voyage réel vers cette île, informez-vous auparavant pour connaître la condition de la piste d’atterrissage et les restrictions entourant son usage par des pilotes de passage.
Cessna sur la piste de Grosse-Île après l’atterrissage.
Cliquez sur le lien pour d’autres expériences de simulation de vol sur mon blogue.
Au décollage de la Rivière des Mille-Îles près de Marina Venise
Le vol d’aujourd’hui fait partie de la catégorie des vols virtuels standards de mon blogue. Le décollage s’effectue sur la Rivière des Mille-Îles au Québec. Il y aura un posé-décollé à Mirabel (CYMX) pour ensuite survoler le Québec et l’Ontario à destination de l’hydrobase de Cascades (CTY3).
En direction de l’aéroport international de Mirabel (CYMX) avec MSFS 2020
En vol à basse altitude en direction de l’aéroport de Mirabel , pour un posé-décollé.
La piste de Mirabel (CYMX) est en vue
On aperçoit une des pistes de CYMX droit devant. Si un pilote virtuel ne la trouve pas assez longue pour effectuer son posé-décollé, c’est qu’un recyclage s’impose.
Posé-décollé effectué à l’aéroport de Mirabel au moyen du simulateur de vol MSFS 2020
Décollage de Mirabel. C’est l’intérêt d’un avion amphibie; on peut se poser partout.
La météo virtuelle montre bien la différence entre la neige au nord et la végétation verte au sud.
Par le travers de l’aéroport de Lachute (CSE4) (bâtiments en rouge au premier plan). Voler en avril au Québec permet de noter la démarcation entre les paysages encore blancs (la neige persiste) au nord et les terrains où tout a déjà fondu.
Au-dessus de Hawksbury en Ontario avec le simulateur de vol MSFS 2020
Le vol se poursuit vers l’hydrobase de Cascades (CTY3). La Rivière des Outaouais sépare le Québec de l’Ontario. L’appareil se trouve actuellement au-dessus de la ville de Hawksbury en Ontario, avec à gauche Hamilton Island.
Réalisme de la simulation de vol sous MSFS 2020
La capture d’écran ci-dessus montre l’effet très réaliste du paysage virtuel, que ce soit au niveau de la météo virtuelle, des multiples tons de couleurs du sol et des ombrages sur le sol et sur l’avion causés par les éclaircies entre les nuages.
Survol du parc national de Plaisance au Québec avec MSFS 2020
La visibilité diminue légèrement près de Gatineau (CYND)
En descente pour 1500 pieds. Près de Gatineau, les conditions se détériorent légèrement. Mais ce sera de courte durée.
En virage pour la rivière Gatineau avec le simulateur de vol MSFS 2020
Virage à droite pour un amerrissage sur la rivière Gatineau. La destination est en vue.
Amerrissage sur la rivière Gatineau pour l’hydrobase de Wakefield (CTY3)
L’avion progresse lentement vers l’hydrobase.
Hydrobase de Wakefield (CTY3) en vue aérienne avec MSFS 2020
Il n’y a pas encore d’hydrobase virtuelle digne de ce nom pour Cascades sous Microsoft. À basse altitude, le pilote note qu’il ne survole qu’une photo avec des empreintes d’aéronefs. Une vue aérienne montre mieux l’emplacement et la localisation de l’hydrobase CTY3.
Bon vol à ceux qui désirent répéter l’expérience. Le trajet s’effectue sans difficulté et demeure intéressant tout au long du parcours.
Le C-130 virtuel des Blue Angels circule à l’aéroport de High River, en Alberta.
Dans le but de rajouter un vol pratiquement impossible dans la section des vols insensés de mon site web, j’ai tenté une panne graduelle des quatre moteurs du C-130 (Captain Sim) des Blue Angels.
Le C-130 Hercules des Blue Angels en attente derrière un monomoteur à l’aéroport de High River.
Je sais que les mécaniciens des Blue Angels sont des professionnels, alors j’assume dès lors que la panne a été causée par une raison indépendante de cette équipe.
Décollage du Lockheed C-130 Hercules des Blue Angels de l’aéroport canadien de High River (CEN4) en Alberta.
Le décollage se fait sans problème de l’aéroport canadien de High River (CEN4), un aéroport gratuit conçu par Vlad Maly et disponible chez ORBX. L’avion quitte la piste de 4150 pieds à destination de l’aéroport de Cœur d’Alène (KCOE) aux États-Unis.
Le premier moteur lâche. Ça ne cause pas de problème important. Mise en drapeau et la montée graduelle continue.
Le C-130 Hercules perd un premier moteur.
Le deuxième moteur s’arrête. Il faut oublier la destination initiale. Le déroutement se fera vers Bonners Ferry (65S) car la piste de 4000 pieds par 75 pieds de large est suffisante pour le C-130.
Le deuxième moteur vient de s’arrêter sur le C-130 Hercules.
Double panne de moteurs sur le C-130 Hercules virtuel des Blue Angels.
Le troisième moteur lâche. Une lente descente débute. Bonners Ferry n’est plus bien loin. L’aéroport est à une altitude de 2337 ft asl.
L’avion est volontairement piloté à une altitude un peu trop haute pour une approche normale, au cas où le quatrième moteur s’arrête. Quand trois moteurs s’arrêtent après le même plein d’essence, le pilote est autorisé à penser que ce qui alimente le quatrième moteur risque également de causer des problèmes.
Trois pannes de moteur sur ce C-130 Hercules virtuel des Blue Angels.
Les montagnes les plus importantes sont maintenant passées.
Avion virtuel C-130 Hercules avec trois moteurs en panne en route vers l’aéroport de Bonners Ferry.
La piste de Bonners Ferry (65S) est en vue.
Avion virtuel C-130 Hercules avec trois moteurs en panne, par le travers de la piste de Bonners Ferry.
Le quatrième moteur s’arrête. Les volets ne sont plus fonctionnels pour l’atterrissage.
Dès maintenant, il faut sauvegarder le vol virtuel à quelques reprises parce qu’il est possible que plusieurs tentatives d’atterrissage soient effectuées en vol plané. De là vient le plaisir du vol virtuel.
Les quatres moteurs sont maintenant en panne sur ce C-130 virtuel.
Le C-130 Hercules est désormais un gros planeur. Quand la même vitesse est conservée, l’avion perd un peu plus de 1000 pieds à la minute. L’inertie est importante.
Les roues ne seront sorties qu’au moment nécessaire car le train d’atterrissage augmente passablement la traînée.
De la position indiquée dans la photo ci-dessous, il est impossible d’arriver directement en ligne droite, l’avion passera au-dessus de la piste. L’avion semble pourtant à une altitude intéressante, mais il s’agit d’une illusion causée par le choix du format grand angle pour la capture d’écran.
L’avion est définitivement trop haut. Et impossible d’utiliser les volets pour augmenter le taux de descente.
Avion Lockheed C-130 Hercules virtuel avec quatre moteurs en panne en approche pour l’aéroport virtuel de Bonners Ferry (65S).
Il faut choisir entre 1) des glissades sur l’aile 2) un virage de 360 degrés pour perdre de l’altitude ou 3) des virages à grande inclinaison en direction de la piste pour augmenter la distance à parcourir.
Quel serait votre choix?
Il n’y a jamais de méthode universelle. Le virage de 360 degrés est le plus risqué mais il peut s’avérer nécessaire. Cela a réussi au commandant Robert Piché aux Açores en 2001 avec son Airbus A330-200 en vol plané). Mais ici, je ne crois pas avoir suffisamment d’altitude en réserve pour compléter le 360 et atteindre la piste.
Il faudra plutôt faire quelques zigzags à grande inclinaison pour rallonger le trajet vers la piste. Pourquoi à grande inclinaison? Pour éviter de trop se rapprocher de l’aéroport tant que l’altitude n’est pas acceptable. Cette méthode devrait permettre de garder un œil en tout temps sur la piste pour vérifier si la pente est toujours bonne pour planer jusqu’à l’aéroport.
Virage de 40 degrés vers la droite en approche pour Bonners Ferry.
Virage grande inclinaison à gauche pour rallonger la distance vers l’aéroport de Bonners Ferry.
J’ai essayé les trois méthodes, toujours à partir du même vol sauvegardé (photo 10). Malgré plusieurs glissades sur l’aile, l’avion se rapproche trop vite de la piste et la vitesse finale se révèle trop élevée pour arrêter un C-130 sans volets ni inverseurs de poussée.
Le virage de 360 degrés, qu’il soit à droite ou à gauche, avec des angles différents et une vitesse raisonnable, fait perdre trop d’altitude à l’appareil. Indéniablement, l’aéronef se présentait toujours entre 200 et 300 pieds avant le seuil de piste.
Finalement, après quelques virages à grande inclinaison, l’avion a été positionné en finale avec la bonne vitesse et la bonne altitude.
Vue du Lockheed C-130 Hercules avec quatre moteurs en panne, en approche pour Bonners Ferry (65S).
Quelques ajustements à la dernière seconde, pour se réaligner au centre de la piste.
Vitesse 150 noeuds. Fin de virage vers Bonners Ferry.
À 140 kts, mais sans inverser la poussée, toute la piste devrait être nécessaire pour arrêter l’appareil.
Vitesse 140 noeuds, enligné avec la piste de Bonners Ferry.
L’atterrissage s’est fait en douceur et l’aéronef s’est immobilisé un peu avant la fin de la piste.
Pour une raison que j’ignore, l’anémomètre indiquait toujours une dizaine de nœuds même lorsque l’avion était arrêté.
Avion-cargo C-130 immobilisé sur la piste de Bonners Ferry.
Avion Lockheed C-130 Hercules virtuel après l’atterrissage à l’aéroport de Bonners Ferry (65S).
Avion C-130 Hercules immobilisé sur la piste de Bonners Ferry.
Essayez ce genre de vol en mode virtuel! Le pire qui puisse arriver est que vous ayez du plaisir!
Pour d’autres vols virtuels insensés, cliquez ici:
Un DHC-6 Twin Otter virtuel en route pour Kokoda après un feu sur le moteur droit au départ de Yongai (KGH) en Papouasie Nouvelle-Guinée PNG (FSX)
Ken Hall et Tim Harris ont créé une nouvelle scène virtuelle pour les amateurs de simulation de vol. Elle se nomme « Tapini» et est vendue par ORBX. Leur avant-dernière création, AYPY Jackson’s International, permettait aux pilotes virtuels de voler vers des aéroports virtuels très exigeants le long de la Kokoda Trail en Papouasie Nouvelle-Guinée. « Tapini » représente un tout nouveau défi et j’ai inclus plusieurs captures d’écran pour vous donner une impression générale des différentes pistes incluses dans cette nouvelle scène virtuelle.
« Tapini », toujours en Papouasie Nouvelle-Guinée, permet aux pilotes virtuels de se mesurer aux défis présentés par sept nouvelles pistes d’atterrissage dans la chaîne de montagnes Owen Stanley. Ces aéroports constituent également un sérieux test pour les aéronefs, comme dans la photo ci-dessus où des dommages au moteur droit ont été subis à Yongai.
Un Piper Pacer virtuel s’apprête à atterrir sur la piste courbée d’Ononge (ONB) en Papouasie Nouvelle-Guinée PNG (FSX). (Il est possible de voir la courbe débutant au haut de l’image)
Pour améliorer les nuages virtuels lors des voyages entre les différents aéroports, j’ai utilisé les moteurs météo REX ou FSGRW. Les textures de nuages et les effets météo ont été améliorés par un ou plusieurs des produits suivants : CumulusX, PrecipitFX, REX Texture Direct et REX Soft Clouds.
Un Dash 7 virtuel après son atterrissage sur l’aéroport de Woitape (WTP) en Papouasie Nouvelle-Guinée PNG (FSX)
Comme il y a du plaisir dans la variété, et également dû aux défis posés par les différentes pistes, les avions virtuels suivants ont été utilisés : Carenado C-185F, Lionheart Creations PA-18, Virtavia DHC-4, Aerosoft DHC-6 Twin Otter et Milton Shupe De Havilland DHC-7.
La scène « Tapini » offre au pilote la sélection des sept pistes suivantes :
ASB (Asimba)
Une piste difficile et très courte près d’une rivière
Un DHC-4 Caribou virtuel en approche pour la piste en pente d’Asimba (ASB) en Papouasie Nouvelle-Guinée PNG (FSX)
Il s’agit d’une piste très intéressante où un avion ADAC tel que le DHC-4 Caribou est approprié. Les habitants doivent cependant offrir leur aide pour vous aider à dégager quelques branches près de la piste et qui sont susceptibles de nuire à un appareil de cette taille. La piste est en pente vers le bas pour le décollage, ce qui aide l’avion à gagner de la vitesse plus rapidement.
Un DHC-4 Caribou virtuel au sol sur la piste d’Asimba (ASB) en Papouasie Nouvelle-Guinée PNG (FSX)
Un DHC-4 Caribou virtuel décolle de la piste en pente d’Asimba (ASB) en Papouasie Nouvelle-Guinée PNG (FSX)
FNE (Fane)
Une piste en pente de 12 degrés présentant un vrai défi. Des vents imprévisibles soufflent sur cette piste à sens unique située en haut d’une colline.
Un avion virtuel De Havilland DHC-7 est en approche pour un atterrissage sur la piste en pente de l’aéroport de Fane (FNE) en Papouasie Nouvelle-Guinée PNG (FSX).
La piste est située au-dessus d’une colline. Atterrir sur cette piste est une expérience vraiment intéressante : pas étonnant qu’il y ait autant de personnes surveillant les arrivées et départs.
Si vous ralentissez trop rapidement après l’atterrissage sur cette piste en pente avec un avion tel que le DHC-7, les douze degrés empêcheront l’appareil de continuer à se déplacer vers l’avant. Vous devrez alors laisser l’avion redescendre doucement la pente en utilisant le pouvoir des moteurs pour contrôler la descente. Le palonnier sera utilisé pour demeurer aligné avec la piste. Il s’agira ensuite d’appliquer de nouveau la pleine puissance pour quelques secondes, juste assez pour franchir la pente.
Un avion virtuel De Havilland DHC-7 circule après un atterrissage sur la piste en pente de l’aéroport de Fane (FNE) en Papouasie Nouvelle-Guinée PNG (FSX)
Pour circuler au sol et replacer le DHC-7 pour le décollage, une combinaison de pouvoir et de poussée inverse est nécessaire jusqu’à ce que tous les obstacles aient été évités (les humains s’aventurant à l’arrière de l’appareil pendant la procédure pourraient être affectés…).
Un avion virtuel De Havilland DHC-7 décolle de la piste en pente de l’aéroport de Fane (FNE) en Papouasie Nouvelle-Guinée PNG (FSX)
Il y a un homme qui n’a pas l’air trop amical et qui tient une carabine près de la zone d’embarquement. Même le personnel des Nations-Unies n’a pas jugé bon de s’éterniser…
KGH (Yongai)
Une piste très bosselée et à sens unique. Un vrai avion de brousse est ici requis!
Un DHC-6 Twin Otter virtuel en approche pour la piste bosselée de Yongai (KGH) en Papouasie Nouvelle-Guinée PNG (FSX)
Même avec un très bon avion de brousse, il est possible qu’une des hélices de l’appareil touche le sol au moment de circuler sur cette piste vraiment spéciale. Il y a tellement de trous profonds et de bosses qui sont difficiles à voir que je ne peux que souhaiter bonne chance à toute personne s’aventurant sur cet aéroport!
Un DHC-6 Twin Otter virtuel au sol sur la piste de Yongai (KGH) en Papouasie Nouvelle-Guinée PNG (FSX)
Portez une attention particulière à la zone près de la petite maison en fin de piste. Le DHC-6 a vraiment été secoué en effectuant les manœuvres pour se repositionner pour le décollage. Une des hélices a touché le sol, mais il n’y avait pas de signes de problème sérieux… jusqu’à ce que l’avion redécolle. L’alarme de feu a retenti juste au moment où l’appareil franchissait le seuil de piste.
Un DHC-6 Twin Otter virtuel avec le moteur droit en feu au décollage de Yongai en Papouasie Nouvelle-Guinée PNG (FSX)
Il a donc fallu abandonner le voyage prévu. Et pas question de retourner à Yongai sur un moteur. J’ai tiré la manette pour éteindre le feu, mis l’hélice en drapeau et coupé l’alimentation en carburant sur le moteur droit pour ensuite me diriger vers l’aéroport de Kokoda étant donné qu’il s’agissait d’un déroutement sûr dû au fait que la piste est suffisamment longue et à une altitude beaucoup plus basse que Yongai.
KSP (Kosipe)
Une piste relativement courte qui requiert des calculs précis de la part du pilote étant donné sa haute altitude dans les montagnes.
Un Cessna C-185F virtuel en route pour l’aéroport de Kosipe (KSP) en Papouasie Nouvelle-Guinée PNG (FSX)
Le Cessna C-185F est très approprié pour cette courte piste. Assurez-vous de ne pas appuyer trop fortement sur les freins à l’arrivée, car les hélices de C-185 sont difficiles à trouver à Kosipe. Vous pouvez atterrir dans les deux directions. Le mélange air/essence doit être absolument ajusté, car l’aéroport se trouve à plus de 6300 pieds.
Un Cessna C-185F virtuel à l’atterrissage sur la piste de Kosipe (KSP) en Papouasie Nouvelle-Guinée PNG (FSX)
Un Cessna C-185F virtuel au décollage de la piste de Kosipe (KSP) en Papouasie Nouvelle-Guinée PNG (FSX)
ONB (Ononge)
Une piste courbée et très bosselée. Pour ceux qui aiment les vols en rase-mottes. Assurez-vous de choisir le bon appareil, car il n’y a pas beaucoup de place pour manœuvrer une fois au sol.
Un Piper Pacer virtuel en approche pour la piste courbée d’Ononge (ONB) en Papouasie-Nouvelle Guinée PNG (FSX)
Ononge est assez impressionnant lorsqu’on se présente en finale pour la première fois. On se demande si la petite trace de terre sur le dessus de la colline peut vraiment être une piste d’atterrissage. Pour ce genre de situation, le Piper Pacer est un excellent avion : il peut approcher très lentement et s’immobilise sur une courte distance. La piste étant courbée, il est nécessaire d’utiliser un peu de palonnier pour maintenir l’avion au milieu de la piste.
A Virtual Piper Pacer on the Ononge curved runway in Papua New Guinea PNG (FSX)
J’imagine que tous ces gens avec leurs valises s’attendaient à un avion un peu plus gros…
Un Piper Pacer virtuel au décollage de la piste courbée d’Ononge (ONB) en Papouasie-Nouvelle Guinée PNG (FSX)
TAP (Tapini)
Une piste exigeante à sens unique et située près d’une vallée étroite. Vous pouvez même utiliser un ILS pour vous y rendre!
Un DHC-4 Caribou en approche finale pour l’aéroport de Tapini (TAP) en Papouasie Nouvelle-Guinée PNG (FSX)
Il s’agit d’une région et d’un aéroport superbement modélisés. Je l’ai visitée avec le DHC-4 Caribou, mais tout autre gros avion ADAC aurait fait l’affaire. Il y a suffisamment de place pour manœuvrer. La piste n’est pas trop bosselée. La pente est intéressante : elle débute en descendant et se termine en montant : cela aide l’aéronef à ralentir après l’atterrissage.
Un DHC-4 Caribou au sol à l’aéroport de Tapini (TAP) en Papouasie Nouvelle-Guinée PNG (FSX)
Un DHC-4 Caribou virtuel décolle de l’aéroport de Tapini (TAP) en Papouasie Nouvelle-Guinée PNG (FSX)
WTP (Woitape)
Cette piste à sens unique et en pente légère semble assez facile d’usage mais elle nécessite des calculs et ajustements assez précis si vous désirez vous y poser avec autre chose qu’un petit appareil.
Un De Havilland DHC-7 virtuel en approche finale pour l’aéroport virtuel de Woitape airport (WTP) en Papouasie Nouvelle-Guinée (FSX)
J’ai trouvé que la piste était assez glissante pour le De Havilland DHC-7. Je dois avouer qu’il y avait un vent de côté important (je volais en météo réelle téléchargée par internet). Le DHC-7 se comporte comme un gros bateau lorsqu’il décélère sur une telle piste.
Un De Havilland DHC-7 virtuel ainsi que deux DHC-6 au sol à l’aéroport virtuel de Woitape airport (WTP) en Papouasie Nouvelle-Guinée (FSX)
La scène virtuelle de Woitape est superbe. Il est très intéressant de trouver des animaux, personnes et avions virtuels conçus de façon aussi réaliste.
Un De Havilland DHC-7 virtuel au décollage de Woitape (WTP), Papouasie Nouvelle-Guinée, (FSX)
J’adore ce nouveau produit de la compagnie Orbx. Lorsque vous volez dans un paysage aussi réaliste, le cerveau ne fait pas de différence entre ce qui est réel et ce qui est virtuel. Cela fonctionne vraiment! Et si vous utilisez la météo réelle téléchargée de l’internet, c’est encore mieux!
J’ai essayé les sept aéroports inclus dans la scène virtuelle « Tapini » et ils sont exigeants. Yongai a été pour moi celui présentant le plus grand défi. J’ai dû faire deux approches manquées étant donné que je me suis présenté chaque fois trop haut sur l’approche. Mais j’ai éventuellement réussi, comme dans la vraie vie!
Le logiciel Microsoft flight simulator X (FSX) a été utilisé pour tous les vols, mais d’autres plateformes auraient également très bien fonctionné et donné d’excellents résultats (Dovetail Games FSX Steam edition (FSX: SE) et toutes les versions de P3D). Les produits suivants étaient également installés sur mon simulateur de vol : FTX Global, FTX Golbal Vector et Holgermesh, de même que Pilot’s FS Global 2010.
Il s’agit d’une expérience virtuelle totalement immersive et vous devez vous concentrer totalement lorsque vous tentez ces vols virtuels exigeants… si vous désirez en ressortir « virtuellement » vivant!
Pour d’autres articles dans la catégorie “Simulation de vol”, cliquez sur le lien suivant : Simulation de vol
L’ancienne appellation était OpusFSX mais depuis l’arrivée sur le marché de P3D, le produit s’appelle maintenant OpusFSI, un nom plus générique.
OpusFSI
OpusFSI est un moteur météo qui, à l’instar de FSGRW, ASN ou REX, télécharge la météo actuelle la plus près de votre route de vol et l’intègre dans votre ordinateur de façon régulière pour que votre vol virtuel se fasse toujours dans des conditions de météo actualisée.
OpusFSI ne fournit pas de textures de nuages additionnelles. Si vous désirez des textures plus intéressantes, il est préférable d’utiliser OpusFSI en conjonction avec REX.
Le programme peut fonctionner sur un réseau, ce qui est pratique si vous désirez transférer certaines fonctions d’OpusFSI vers un deuxième ordinateur pour ménager les ressources de l’ordinateur principal.
OpusFSI est compatible avec FSX, FSX : SE et P3D et même avec les contrôles deTrackIR real-time 3D view (certains fichiers devront être désactivés dans Program Files si vous utilisiez déjà TrackIR avant de vous procurer Opus). Vous avez accès à de multiples cartes graphiques pour consulter la météo ou les SIDs/Stars et pour ajuster les différentes options à votre goût.
OpusFSI est un programme très avancé qui est bien adapté à l’usage des caméras de cockpit virtuelles. Il reproduit les mouvements de tête causés par les vibrations et la turbulence et permet de varier les vues de gauche à droite lors des manœuvres de circulation au sol ou des virages en vol. Tous les effets sont variables et peuvent être ajustés par l’utilisateur.
Si votre système comporte plusieurs écrans, il vous est possible de programmer des vues différentes pour chaque écran de façon à simuler les fenêtres de droite et gauche.
OpusFSI vous permet d’utiliser la météo passée si vous le désirez. Le programme offre également la possibilité de relocaliser la météo au-dessus d’un aéroport A pour la transposer sur l’aéroport B. De même, vous pouvez décider de faire disparaître certaines couches de nuages bas ou choisir d’éliminer les obstacles à la visibilité si vous désirez avoir une vision parfaite du territoire. À la limite, vous pouvez même créer votre propre Metar.
Comme pour les autres moteurs météo sur le marché, vous avez accès à un mode « plan de vol ».
Une option vous permet d’inclure la turbulence et le cisaillement de vent générés par le terrain environnant en-dedans de 80 kilomètres d’un aéroport virtuel.
Les données gérées par OpusFSI peuvent être utilisées directement dans le B-737 NGX de PMDG, ce qui signifie que vous pouvez voir la météo réelle sur le radar de l’appareil.
OpusFSI est en développement continuel et de nouvelles fonctions sont fréquemment ajoutées. Elles ne sont pas toutes énumérées dans le présent article.
Comme pour tous les autres moteurs météo disponibles sur le marché, il est nécessaire de consulter le site de la compagnie afin de choisir le programme approprié au type de vol virtuel que vous pratiquez et à l’équipement que vous utilisez déjà ou prévoyez utiliser.
D-LZ127 Graf Zeppelin au-dessus de l’Allemagne (FSX)
Utilisant le programme ORBX Global, j’ai pris cette capture d’écran sous FSX du Graf Zeppelin au-dessus de l’Allemagne. Les nuages virtuels sont générés par les produits de la compagnie REX et le Zeppelin lui-même a été trouvé sur le site flightsim.com; il s’agit d’un téléchargement gratuit. Pour une meilleure lumière, si vous décidez de conserver une capture d’écran, volez le Zeppelin à l’aube ou au crépuscule, au moment où il y a suffisamment de clarté, et où les rayons du soleil frapperont le ballon sur son côté.
Quelques vidéos sont disponibles sur YouTube pour vous montrer comment piloter le Zeppelin. Ce n’est pas suffisant d’appliquer pleins gaz et d’espérer que le dirigeable va s’envoler. Il restera au sol. Vous devez d’abord vous occuper des ballasts. En quelques minutes seulement de visionnement des vidéos et après avoir appliqué les premières corrections obligatoires pour le départ, je vous promets que vous réussirez à décoller sans difficulté et que le reste du vol se fera sans problèmes.
La capture d’écran a été légèrement modifiée avec Photoshop pour accroître les contrastes.