Un DHC-3 de la compagnie Air Saguenay a réussi à faire le voyage entre le Québec et Kokoda en Papouasie Nouvelle-Guinée. Il travaillera dans le secteur, sur les différentes pistes en montagne, durant plusieurs mois.
Le Otter d’Air Saguenay circule pour la piste de Kokoda en direction de Launumu en Papouasie Nouvelle-Guinée.
Aujourd’hui, le Otter se dirige vers Launumu, une piste en montagne dont l’élévation est de 5082 pieds asl et qui a une longueur de 1200 pieds.
Le Otter d’Air Saguenay au départ de Kokoda.
Il faut surveiller les oiseaux pour éviter les collisions en vol.
Avion Otter et oiseaux.
Une bonne façon d’atteindre Launumu est de suivre le sentier de Kokoda.
Le Otter dans les montagnes de la Nouvelle-Guinée, suivant la piste de Kokoda.
Si le mélange air/essence n’est pas bien ajusté, l’aéronef perdra de la puissance en tentant de franchir certaines montagnes dont le sommet culmine autour de 7500 pieds.
Tableau de bord du Otter avec le mélange air/essence ajusté.
Tout pilote atterrissant ou quittant Launumu doit composer avec une haute altitude densité. Ce n’est pas seulement dû à l’élévation de la piste, mais aussi à la présence d’air chaud et humide dans la région. En conséquence, une vitesse un peu plus élevée sera nécessaire au moment de l’arrivée et du départ. La piste de Launumu est en vue.
La piste de Launumu est en vue.
Lorsqu’un pilote atterri en direction sud-ouest sur la piste de Launumu, en provenance de Kokoda, il doit plonger dans la vallée pour perdre de l’altitude. Cela aura pour conséquence d’accroître la vitesse de l’appareil.
Si la vitesse n’est pas promptement corrigée, l’approche pour la piste de Launumu se fera à une vitesse trop élevée. Toute vitesse en haut de 60 nœuds forcera le pilote à effectuer une approche manquée (à moins que vous soyez prêt à mourir virtuellement quelques fois en tentant de forcer l’approche).
Perte d’altitude en respectant la limite des volets.
Donc, une fois les plus hautes montagnes franchies, une bonne façon de perdre de l’altitude sans gagner de vitesse est d’utiliser les volets et de faire un virage serré de 360 degrés tout en descendant. De cette façon, le pilote terminera le virage en ligne avec la piste et à la vitesse désirée, qui se situe autour de 50 nœuds.
Virage en descente dans la vallée pour une approche vers Launumu.
Le Otter plane longuement grâce à ses immenses ailes.
Le Otter d’Air Saguenay en approche pour la courte piste de Launumu en Papouasie Nouvelle-Guinée.
En finale pour la piste de Launumu, le pilote devra composer avec quelques arbustes en finale. Il n’est pas inhabituel pour un Otter ou un Beaver de compléter une approche difficile avec quelques plantes vertes enroulées autour du train d’atterrissage.
Le Otter d’Air Saguenay en finale pour la piste en montagne de Launumu.
Arrivée d’un avion de type Otter sur la piste en altitude de Launumu.
Launumu offre une surprise aux nouveaux arrivants. Si le pilote atterri en direction sud-ouest, comme cela est fait ici, et qu’il n’immobilise pas l’avion en-dedans d’approximativement 600 pieds, l’aéronef recommence à accélérer à cause de la pente prononcée dans la deuxième partie de la piste. Cette pente mène à une falaise. En cas d’approche manquée, le pilote peut utiliser la pente descendante pour plonger dans la vallée en fin de piste et ainsi accroître la vitesse de l’appareil et débuter une nouvelle approche.
Maintenant que le travail difficile est fait, il suffit d’attendre les passagers et la cargaison et de planifier le prochain vol!
Un aéronef Otter remonte la piste à rebours après un atterrissage sur la piste en pente de Launumu.
Avion de type Otter stationné sur la piste de Launumu en Papouasie Nouvelle-Guinée.
La scène virtuelle a été conçue par Ken Hall et Tim Harris.
Les paysages et les nuages virtuels ont nécessité les programmes virtuels tels que REX, REX Texture Direct, Cumulus X, FTX Global, FTX Global Vector et Pilot’s FS Global 2010.
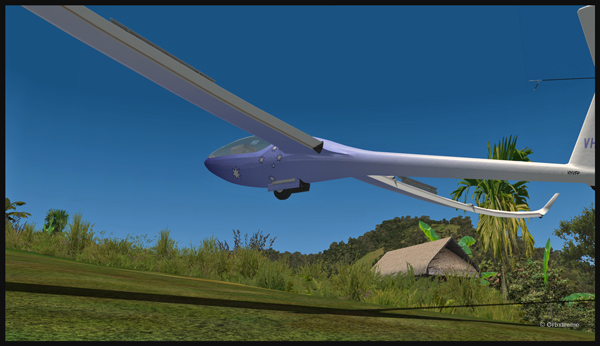
Tout est maintenant prêt! Le premier planeur est arrivé à l’aéroport de Fane Parish en Papouasie Nouvelle-Guinée …
Planeur sur la courte piste en gazon et en pente de Fane Parish en Papouasie Nouvelle-Guinée.
Avant que ce soit officiellement offert en tant qu’attraction touristique pour la région, quelques essais de décollage et atterrissage doivent être effectués. Le premier essai attire quelques curieux!
Avion et planeur sur la piste en montagne de Fane Parish.
La descente le long de la piste en pente de 12 degrés secoue un peu et le devant des ailes est un peu égratigné. Certains petits buissons devront être élagués!
Un aéronef tire un planeur au décollage de la piste en pente de Fane Parish en Papouasie Nouvelle-Guinée.
La météo est superbe et la température très chaude. Le seul problème potentiel est la montagne droit devant.
Planeur tiré par un avion après le décollage de la piste en montagne de Fane Parish.
Le pilote coupe finalement le lien. Il est libre d’explorer les environs!
Lien coupé entre l’avion et le planeur après le décollage de Fane Parish.
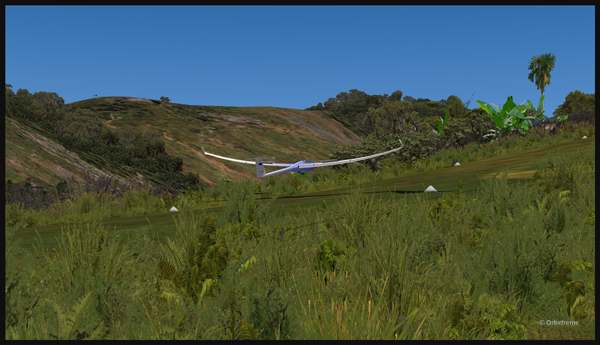
Le planeur survole silencieusement la jungle de la Papouasie Nouvelle-Guinée.
Survol du territoire de la Papouasie Nouvelle-Guinée avec un planeur virtuel (FSX)
Utilisant les courants d’air chaud, le planeur gagne en altitude.
Le planeur prend de l’altitude.
Pourquoi pas un survol du village de Fane?
Survol du village de Fane Parish avec un planeur virtuel.
Et voici un autre village isolé le long de la montagne.
Vol avec planeur virtuel au-dessus d’un village isolé de Papouasie Nouvelle-Guinée
Un dernier virage serré pour débuter l’approche vers Fane Parish.
Dernier virage serré pour un atterrissage court sur la piste en pente de Fane Parish
Les aérofreins sont sortis et la vitesse est raisonnable. La piste en pente est juste devant, sur le sommet de la montagne de droite.
Approche d’un planeur pour la piste en terrain élevé de Fane Parish en Papouasie Nouvelle-Guinée. La vitesse est appropriée et l’angle est bon.
Il faut conserver juste assez d’altitude pour être certain de se rendre jusqu’à la piste.
Planeur en approche pour la piste en pente de 12 degrés de l’aéroport de Fane Parish.
Maintenant que l’atterrissage est assuré, il est temps d’utiliser les aérofreins pour ralentir le planeur.
Planeur virtuel arrivant au-dessus de la piste de Fane Parish en Papouasie Nouvelle-Guinée. Les aérofreins sont sortis.
Étant donné que cette piste d’atterrissage en altitude a une bonne pente, il est préférable de conserver un peu de vitesse. Aucun pilote n’apprécie un décrochage à quelques pieds au-dessus de la piste.
Planeur virtuel avec aérofreins au-dessus de la piste de Fane Parish
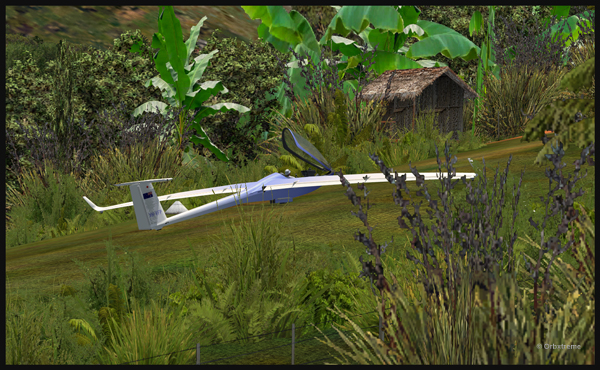
Quelle expérience! Mais le pilote aura besoin d’aide pour remonter le planeur le long de la pente!
Planeur sur la piste de Fane Parish
Le vol était superbe, la vue en valait vraiment la peine. Je pense que cette activité de planeur pourrait devenir une attraction touristique pour la région et les visiteurs plus fortunés …
Planeur atterri sur la piste de l’aéroport de Fane Parish en Papouasie Nouvelle-Guinée
La scène virtuelle est une création de Ken Hall et Tim Harris pour la compagnie ORBX.
Le vol virtuel ci-dessous a été effectué avec la plateforme FSX. La dernière fois que j’ai atterri et décollé de Limberlost Ranch, c’était avec un Cessna C-207 ( Limberlost Ranch et le Cessna C-207 ).
Cette fois, j’ai essayé cette piste latéralement inégale et en pente avec un Twin Otter. Ce dernier est aux couleurs réelles du Ministère des ressources naturelles de l’Ontario (C-FOPG). Le seul problème qui pouvait se poser était la largeur des ailes une fois rendu près du hangar.
En finale pour la piste en pente de Limberlost Ranch
Approche du Twin Otter C-FOPG pour la courte piste de Limberlost Ranch
Finalement, tout s’est bien passé. La seule vraie difficulté est de manœuvrer près du hangar pour repositionner le Twin Otter pour le décollage. En modifiant continuellement le pas de l’hélice, cela finit par fonctionner.
Arrivée à Limberlost Ranch du Twin Otter C-FOPG
Avion virtuel du gouvernement de l’Ontario faisant demi-tour sur la piste de Limberlost Ranch.
La clôture n’étant pas trop haute, elle ne présente pas de problème pour les ailes de l’aéronef.
Aéronef virtuel C-FOPG roule sur la piste de Limberlost Ranch (CA21)
Au bout de la courte piste en gazon, quelques grands arbres obligent à effectuer un léger virage alors que l’avion est en montée. Juste au cas où …
Avion Twin Otter quittant Limberlost Ranch (CA21)
Limberlost Ranch est un défi amusant. L’aérodrome est vendu par Orbx et vient avec l’aéroport Blue-Canyon Nyack.
Si cela n’est pas suffisant pour l’amateur de simulation de vol, il n’y a qu’à rajouter de bons vents directement de travers et le tour sera joué!
La cause des délais et les avantages pour le consommateur
Le jet régional virtuel de Bombardier CRJ-900ER (Aerosoft) portant les couleurs de la compagnie Alaska Airlines est en montée dans la région de Valdez en Alaska (ORBX)
Digital Aviation & Aerosoft ont finalement réussi à compléter leur projet de créer les aéronefs virtuels CRJ-900ER et CRJ-700ER de Bombardier. Après des mois de retard, les enthousiastes de simulation de vol peuvent enfin se réjouir. Le CRJ est surtout utilisé pour faire la liaison entre les aéroports et régions un peu plus éloignées et les grands centres. Il atteint rapidement son altitude de croisière et peut y rester longtemps, mais il n’est pas conçu pour être un aéronef très rapide.
La compagnie explique que dès le départ, elle a sous-estimé la complexité du projet et, à cause des délais encourus, s’est finalement fait rattraper par la compétition. Afin d’offrir un produit supérieur, elle a dû revoir ce qui était considéré comme presque terminé pour l’améliorer encore davantage avant la mise en marché.
Avion virtuel CRJ-700ER (Aerosoft) de la compagnie aérienne Alaska Airlines au décollage de l’aéroport virtuel de Valdez (ORBX)
Avec le CRJ-700ER et le CRJ-900ER, le consommateur peut d’ores et déjà bénéficier d’aéronefs dont l’extérieur a été complètement revu par rapport à ce qui était initialement prévu. Le directeur de projet indique que ce n’est que grâce aux encouragements et aux appuis de la communauté des amateurs de simulation de vol que la compagnie a décidé de compléter le projet, malgré les retards et les coûts additionnels.
Le premier vol avec le CRJ
Aéronef virtuel CRJ-900ER de la compagnie Air Nostrum au départ de l’aéroport virtuel de St-Martin (Fly Tampa St.Maarten)
Pour le premier vol, le manuel recommande de sélectionner et activer d’abord un des avions initialement fournis avec FSX, avec le moteur déjà démarré. Ensuite, le pilote virtuel sélectionne le CRJ de son choix. Cela évitera, selon les dires de la compagnie, de multiples problèmes.
Cockpit virtuel 2D
Le fait que le cockpit virtuel soit en 2D permet certainement de sauver quelques FPS. L’accès aux boutons et commandes à l’intérieur du cockpit est simplifié par l’usage des chiffres de 1 à 9 sur le clavier, chaque chiffre donnant un accès immédiat à la section choisie du tableau de bord et des commandes.
Navigation
Le pilote virtuel a accès à la base de données NavDataPro pour la navigation aérienne. Il s’agit de la base de données la plus utilisée dans le monde pour la navigation dans les aéronefs. Cependant, il y a possibilité d’utiliser Navigraph, pour ceux qui connaissent déjà ce logiciel.
Demande sur les processeurs de l’ordinateur
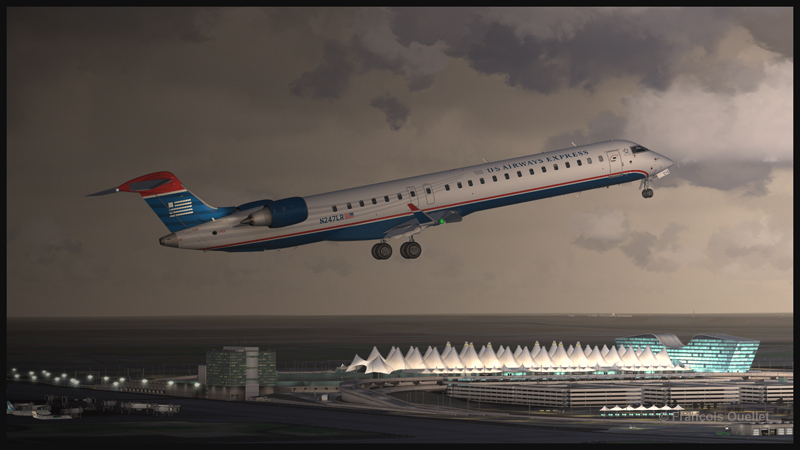
Avion virtuel CRJ-900ER (Aerosoft) de la compagnie U.S. Airways au décollage de l’aéroport virtuel de Denver (Flightbeam Studios)
J’ai opéré les appareils sur différents aéroports virtuels tels que St. Maarten (Fly Tampa St. Maarten), Montréal international (Fly Tampa Montreal), Denver international (Flightbeam Studios) et Valdez (ORBX) sans éprouver d’ennuis quant aux processeurs du simulateur de vol. Il était hors de question de tenter d’utiliser l’aéroport de Courchevel (LLH Creations), à cause de sa trop courte piste en pente, mais le survol à basse altitude et haute vitesse n’a causé aucun problème quant aux FPS.
Un avion virtuel CRJ-700ER (Aerosoft) de la compagnie Air France HOP est en vol au-dessus de l’aéroport virtuel de Courchevel en France (LLH Creations)
Pilotage à basse vitesse
Le CRJ offre une bonne marge de manœuvre quant au pilotage à basse vitesse. Cependant, dû au positionnement des moteurs, le nez de l’avion se soulève rapidement lorsque la manette des gaz est ramenée à zéro. Dans une descente progressive, cela ne cause pas de problème, mais si la manœuvre est faite en courte finale, alors que l’avion est encore au-dessus de 50 pieds, le nez se soulèvera rapidement et la vitesse baissera considérablement, ce qui peut provoquer un décrochage.
Les aérofreins
Il ne faut pas trop compter sur les aérofreins pour ralentir le CRJ. Ils sont d’une efficacité limitée, autant dans la vraie vie que dans le vol virtuel.
Tendance au flottement
Si l’avion se présente un peu au-dessus de la vitesse recommandée au-dessus du seuil de piste, il flotte sur une longue distance avant de finalement entrer en contact avec la piste.
Distance de décollage et d’atterrissage
Un avion virtuel CRJ-900ER de la compagnie Air Canada (Aerosoft) est en approche pour l’aéroport international Pierre-Elliott-Trudeau de Montréal (Fly Tampa Montréal)
Le CRJ se satisfait de pistes relativement courtes pour ses opérations. Le CRJ-700 nécessite 5040 pieds pour le décollage (poids maximal) et l’atterrissage (poids maximal autorisé), dans des conditions atmosphériques standard. Le CRJ-900 a, quant à lui, besoin de 6060 pieds pour le décollage et de 5260 pieds pour l’atterrissage. La distance pouvant être couverte se situe entre 1300 et 1400 nm.
Programmes faciles à utiliser
Pour le CRJ, Digital Aviation & Aerosoft ont conçu des gestionnaires qui permettent de choisir le nombre de passagers désirés et le cargo, de même que de calculer le poids en carburant, le centre de gravité et le montant de compensateur nécessaire pour le décollage. Il y a même une fonction FS2 Crew si désirée. Un autre gestionnaire facilite l’installation de nouvelles couleurs de compagnies.
L’arrivée de ce jet régional dans le monde de la simulation de vol était attendue depuis longtemps; certains n’y croyaient plus, incluant les gens de Digital Aviation & Aerosoft eux-mêmes. Les amateurs vont enfin pouvoir mettre la main sur un jet régional virtuel de grande qualité et de classe mondiale.
Pour d’autres articles dans la catégorie “Simulation de vol”, cliquez sur le lien suivant : Simulation de vol
Les photos suivantes montrent un vol virtuel effectué aux États-Unis. Le vol se fait à partir de KBLU (Blue Canyon-Nyack) vers Limberlost Ranch (CA21) et ensuite vers Gansner Field (201). Atterrir et décoller de l’aéroport de Limberlost Ranch est un défi intéressant.
Pour cette simulation de vol, le simulateur de vol FSX a été utilisé, de même que le Cessna C-207 de Carenado et les nuages modélises de REX.
Au décollage de KBLU.
Le Cessna C-207 est au décollage de la piste de Blue Canyon-Nyack
En route de KBLU (5284 pieds ASL) vers Limberlost Ranch et sa piste de gazon de 1700 pieds (1650 pieds ASL et environ 23 NM à l’est de KBLU), vous passez par le travers de l’aéroport Nevada County (O17) qui a également reçu un traitement spécial de la compagnie ORBX.
Il peut s’avérer nécessaire de survoler l’aéroport de Limberlost Ranch avant d’entamer une approche, histoire de vous faire une idée de ce qu’il faut anticiper une fois en finale.
Au-dessus de la courte piste en pente de Limberlost Ranch
Limberlost Ranch a une piste en pente (en fait, une piste avec de multiples pentes). Une partie de celle-ci est asphaltée, mais la plus grande partie est en gazon. Vous faites l’approche sur la partie en gazon. Notez qu’il y a une clôture sur le côté au début de la piste : l’aéronef virtuel ne devrait pas toucher le sol avant d’avoir dépasser la clôture (pour un plus grand réalisme).
Le Cessna C-207 est en finale pour la piste de Limberlost Ranch
Atterrissage sur la courte piste en pente et en gazon de Limberlost Ranch
Le Cessna C-207 est stationné à Limberlost Ranch pour quelques minutes
Prêt pour le décollage de la piste de Limberlost Ranch
Avec un peu de vent de travers, décoller de cette courte piste peut être exigeant. L’avion réagit mollement; il se comporte un peu comme un bateau. Il faut s’assurer d’éviter la ligne d’arbres sur le côté gauche de cette étroite piste. Les volets doivent être utilisés, comme cela est la norme lors d’opérations sur piste en terrain mou. Un usage avisé du gouvernail de profondeur fera de votre décollage un succès.
Décollage de la piste de Limberlost Ranch
En route vers Gansner Field.
Gansner Field est environ à 41 NM au nord de KBLU. L’aéroport virtuel est très bien fait et se trouve au creux d’une vallée. Arrivant de KBLU, vous devez passer quelques montagnes d’une hauteur de 6000 pieds avant de descendre plutôt rapidement vers la piste asphaltée située à 3419 pieds ASL).
Au-dessus de la piste de l’aéroport de Gansner Field
Pour apprécier pleinement ces vols virtuels, je vous suggère d’installer les différentes couches de produits ORBX (Global, Vector et Open LC), de même que la scène virtuelle de KBLU.
Pour d’autres articles dans la catégorie “Simulation de vol”, cliquez sur le lien suivant : Simulation de vol
Un DHC-6 Twin Otter virtuel en route pour Kokoda après un feu sur le moteur droit au départ de Yongai (KGH) en Papouasie Nouvelle-Guinée PNG (FSX)
Ken Hall et Tim Harris ont créé une nouvelle scène virtuelle pour les amateurs de simulation de vol. Elle se nomme « Tapini» et est vendue par ORBX. Leur avant-dernière création, AYPY Jackson’s International, permettait aux pilotes virtuels de voler vers des aéroports virtuels très exigeants le long de la Kokoda Trail en Papouasie Nouvelle-Guinée. « Tapini » représente un tout nouveau défi et j’ai inclus plusieurs captures d’écran pour vous donner une impression générale des différentes pistes incluses dans cette nouvelle scène virtuelle.
« Tapini », toujours en Papouasie Nouvelle-Guinée, permet aux pilotes virtuels de se mesurer aux défis présentés par sept nouvelles pistes d’atterrissage dans la chaîne de montagnes Owen Stanley. Ces aéroports constituent également un sérieux test pour les aéronefs, comme dans la photo ci-dessus où des dommages au moteur droit ont été subis à Yongai.
Un Piper Pacer virtuel s’apprête à atterrir sur la piste courbée d’Ononge (ONB) en Papouasie Nouvelle-Guinée PNG (FSX). (Il est possible de voir la courbe débutant au haut de l’image)
Pour améliorer les nuages virtuels lors des voyages entre les différents aéroports, j’ai utilisé les moteurs météo REX ou FSGRW. Les textures de nuages et les effets météo ont été améliorés par un ou plusieurs des produits suivants : CumulusX, PrecipitFX, REX Texture Direct et REX Soft Clouds.
Un Dash 7 virtuel après son atterrissage sur l’aéroport de Woitape (WTP) en Papouasie Nouvelle-Guinée PNG (FSX)
Comme il y a du plaisir dans la variété, et également dû aux défis posés par les différentes pistes, les avions virtuels suivants ont été utilisés : Carenado C-185F, Lionheart Creations PA-18, Virtavia DHC-4, Aerosoft DHC-6 Twin Otter et Milton Shupe De Havilland DHC-7.
La scène « Tapini » offre au pilote la sélection des sept pistes suivantes :
ASB (Asimba)
Une piste difficile et très courte près d’une rivière
Un DHC-4 Caribou virtuel en approche pour la piste en pente d’Asimba (ASB) en Papouasie Nouvelle-Guinée PNG (FSX)
Il s’agit d’une piste très intéressante où un avion ADAC tel que le DHC-4 Caribou est approprié. Les habitants doivent cependant offrir leur aide pour vous aider à dégager quelques branches près de la piste et qui sont susceptibles de nuire à un appareil de cette taille. La piste est en pente vers le bas pour le décollage, ce qui aide l’avion à gagner de la vitesse plus rapidement.
Un DHC-4 Caribou virtuel au sol sur la piste d’Asimba (ASB) en Papouasie Nouvelle-Guinée PNG (FSX)
Un DHC-4 Caribou virtuel décolle de la piste en pente d’Asimba (ASB) en Papouasie Nouvelle-Guinée PNG (FSX)
FNE (Fane)
Une piste en pente de 12 degrés présentant un vrai défi. Des vents imprévisibles soufflent sur cette piste à sens unique située en haut d’une colline.
Un avion virtuel De Havilland DHC-7 est en approche pour un atterrissage sur la piste en pente de l’aéroport de Fane (FNE) en Papouasie Nouvelle-Guinée PNG (FSX).
La piste est située au-dessus d’une colline. Atterrir sur cette piste est une expérience vraiment intéressante : pas étonnant qu’il y ait autant de personnes surveillant les arrivées et départs.
Si vous ralentissez trop rapidement après l’atterrissage sur cette piste en pente avec un avion tel que le DHC-7, les douze degrés empêcheront l’appareil de continuer à se déplacer vers l’avant. Vous devrez alors laisser l’avion redescendre doucement la pente en utilisant le pouvoir des moteurs pour contrôler la descente. Le palonnier sera utilisé pour demeurer aligné avec la piste. Il s’agira ensuite d’appliquer de nouveau la pleine puissance pour quelques secondes, juste assez pour franchir la pente.
Un avion virtuel De Havilland DHC-7 circule après un atterrissage sur la piste en pente de l’aéroport de Fane (FNE) en Papouasie Nouvelle-Guinée PNG (FSX)
Pour circuler au sol et replacer le DHC-7 pour le décollage, une combinaison de pouvoir et de poussée inverse est nécessaire jusqu’à ce que tous les obstacles aient été évités (les humains s’aventurant à l’arrière de l’appareil pendant la procédure pourraient être affectés…).
Un avion virtuel De Havilland DHC-7 décolle de la piste en pente de l’aéroport de Fane (FNE) en Papouasie Nouvelle-Guinée PNG (FSX)
Il y a un homme qui n’a pas l’air trop amical et qui tient une carabine près de la zone d’embarquement. Même le personnel des Nations-Unies n’a pas jugé bon de s’éterniser…
KGH (Yongai)
Une piste très bosselée et à sens unique. Un vrai avion de brousse est ici requis!
Un DHC-6 Twin Otter virtuel en approche pour la piste bosselée de Yongai (KGH) en Papouasie Nouvelle-Guinée PNG (FSX)
Même avec un très bon avion de brousse, il est possible qu’une des hélices de l’appareil touche le sol au moment de circuler sur cette piste vraiment spéciale. Il y a tellement de trous profonds et de bosses qui sont difficiles à voir que je ne peux que souhaiter bonne chance à toute personne s’aventurant sur cet aéroport!
Un DHC-6 Twin Otter virtuel au sol sur la piste de Yongai (KGH) en Papouasie Nouvelle-Guinée PNG (FSX)
Portez une attention particulière à la zone près de la petite maison en fin de piste. Le DHC-6 a vraiment été secoué en effectuant les manœuvres pour se repositionner pour le décollage. Une des hélices a touché le sol, mais il n’y avait pas de signes de problème sérieux… jusqu’à ce que l’avion redécolle. L’alarme de feu a retenti juste au moment où l’appareil franchissait le seuil de piste.
Un DHC-6 Twin Otter virtuel avec le moteur droit en feu au décollage de Yongai en Papouasie Nouvelle-Guinée PNG (FSX)
Il a donc fallu abandonner le voyage prévu. Et pas question de retourner à Yongai sur un moteur. J’ai tiré la manette pour éteindre le feu, mis l’hélice en drapeau et coupé l’alimentation en carburant sur le moteur droit pour ensuite me diriger vers l’aéroport de Kokoda étant donné qu’il s’agissait d’un déroutement sûr dû au fait que la piste est suffisamment longue et à une altitude beaucoup plus basse que Yongai.
KSP (Kosipe)
Une piste relativement courte qui requiert des calculs précis de la part du pilote étant donné sa haute altitude dans les montagnes.
Un Cessna C-185F virtuel en route pour l’aéroport de Kosipe (KSP) en Papouasie Nouvelle-Guinée PNG (FSX)
Le Cessna C-185F est très approprié pour cette courte piste. Assurez-vous de ne pas appuyer trop fortement sur les freins à l’arrivée, car les hélices de C-185 sont difficiles à trouver à Kosipe. Vous pouvez atterrir dans les deux directions. Le mélange air/essence doit être absolument ajusté, car l’aéroport se trouve à plus de 6300 pieds.
Un Cessna C-185F virtuel à l’atterrissage sur la piste de Kosipe (KSP) en Papouasie Nouvelle-Guinée PNG (FSX)
Un Cessna C-185F virtuel au décollage de la piste de Kosipe (KSP) en Papouasie Nouvelle-Guinée PNG (FSX)
ONB (Ononge)
Une piste courbée et très bosselée. Pour ceux qui aiment les vols en rase-mottes. Assurez-vous de choisir le bon appareil, car il n’y a pas beaucoup de place pour manœuvrer une fois au sol.
Un Piper Pacer virtuel en approche pour la piste courbée d’Ononge (ONB) en Papouasie-Nouvelle Guinée PNG (FSX)
Ononge est assez impressionnant lorsqu’on se présente en finale pour la première fois. On se demande si la petite trace de terre sur le dessus de la colline peut vraiment être une piste d’atterrissage. Pour ce genre de situation, le Piper Pacer est un excellent avion : il peut approcher très lentement et s’immobilise sur une courte distance. La piste étant courbée, il est nécessaire d’utiliser un peu de palonnier pour maintenir l’avion au milieu de la piste.
A Virtual Piper Pacer on the Ononge curved runway in Papua New Guinea PNG (FSX)
J’imagine que tous ces gens avec leurs valises s’attendaient à un avion un peu plus gros…
Un Piper Pacer virtuel au décollage de la piste courbée d’Ononge (ONB) en Papouasie-Nouvelle Guinée PNG (FSX)
TAP (Tapini)
Une piste exigeante à sens unique et située près d’une vallée étroite. Vous pouvez même utiliser un ILS pour vous y rendre!
Un DHC-4 Caribou en approche finale pour l’aéroport de Tapini (TAP) en Papouasie Nouvelle-Guinée PNG (FSX)
Il s’agit d’une région et d’un aéroport superbement modélisés. Je l’ai visitée avec le DHC-4 Caribou, mais tout autre gros avion ADAC aurait fait l’affaire. Il y a suffisamment de place pour manœuvrer. La piste n’est pas trop bosselée. La pente est intéressante : elle débute en descendant et se termine en montant : cela aide l’aéronef à ralentir après l’atterrissage.
Un DHC-4 Caribou au sol à l’aéroport de Tapini (TAP) en Papouasie Nouvelle-Guinée PNG (FSX)
Un DHC-4 Caribou virtuel décolle de l’aéroport de Tapini (TAP) en Papouasie Nouvelle-Guinée PNG (FSX)
WTP (Woitape)
Cette piste à sens unique et en pente légère semble assez facile d’usage mais elle nécessite des calculs et ajustements assez précis si vous désirez vous y poser avec autre chose qu’un petit appareil.
Un De Havilland DHC-7 virtuel en approche finale pour l’aéroport virtuel de Woitape airport (WTP) en Papouasie Nouvelle-Guinée (FSX)
J’ai trouvé que la piste était assez glissante pour le De Havilland DHC-7. Je dois avouer qu’il y avait un vent de côté important (je volais en météo réelle téléchargée par internet). Le DHC-7 se comporte comme un gros bateau lorsqu’il décélère sur une telle piste.
Un De Havilland DHC-7 virtuel ainsi que deux DHC-6 au sol à l’aéroport virtuel de Woitape airport (WTP) en Papouasie Nouvelle-Guinée (FSX)
La scène virtuelle de Woitape est superbe. Il est très intéressant de trouver des animaux, personnes et avions virtuels conçus de façon aussi réaliste.
Un De Havilland DHC-7 virtuel au décollage de Woitape (WTP), Papouasie Nouvelle-Guinée, (FSX)
J’adore ce nouveau produit de la compagnie Orbx. Lorsque vous volez dans un paysage aussi réaliste, le cerveau ne fait pas de différence entre ce qui est réel et ce qui est virtuel. Cela fonctionne vraiment! Et si vous utilisez la météo réelle téléchargée de l’internet, c’est encore mieux!
J’ai essayé les sept aéroports inclus dans la scène virtuelle « Tapini » et ils sont exigeants. Yongai a été pour moi celui présentant le plus grand défi. J’ai dû faire deux approches manquées étant donné que je me suis présenté chaque fois trop haut sur l’approche. Mais j’ai éventuellement réussi, comme dans la vraie vie!
Le logiciel Microsoft flight simulator X (FSX) a été utilisé pour tous les vols, mais d’autres plateformes auraient également très bien fonctionné et donné d’excellents résultats (Dovetail Games FSX Steam edition (FSX: SE) et toutes les versions de P3D). Les produits suivants étaient également installés sur mon simulateur de vol : FTX Global, FTX Golbal Vector et Holgermesh, de même que Pilot’s FS Global 2010.
Il s’agit d’une expérience virtuelle totalement immersive et vous devez vous concentrer totalement lorsque vous tentez ces vols virtuels exigeants… si vous désirez en ressortir « virtuellement » vivant!
Pour d’autres articles dans la catégorie “Simulation de vol”, cliquez sur le lien suivant : Simulation de vol
Si vous recherchez un vol virtuel exigeant, pourquoi ne pas essayer le trajet Syangboche – Lukla avec le DHC-6 Twin Otter de la compagnie Aerosoft? Il s’agit d’un vol de très courte durée, quelques minutes seulement, où l’avion est continuellement en descente jusqu’à sa destination.
Un avion Twin Otter est en descente de Syangboche pour la piste de Lukla
L’approche à Lukla est trompeuse, à cause d’une piste en pente de12 degrés. Vous avez l’impression d’arriver trop vite, mais il faut résister à la tentation de diminuer la vitesse : à cette altitude, le décrochage survient à une vitesse plus élevée avec n’importe quel aéronef.
Un avion Twin Otter est en approche pour la piste 06 de Lukla
Un avion Twin Otter est en courte finale piste 06 pour Lukla
Il n’y a qu’une piste pour l’atterrissage, la 06. Les départs ne se font que de la piste 24. Il n’y a pas vraiment de possibilité d’approche manquée : c’est la réussite ou l’écrasement, car devant vous se trouve une paroi rocheuse insurmontable.
Un avion Twin Otter se prépare à atterrir sur la piste 06 de Lukla
Le vol se fait donc au départ de Syangboche (code OACI :VNSB, altitude : 3748m et piste de 400m) vers Lukla (code OACI :VNLK, altitude 2860m et piste de 460m).
Un avion Twin Otter se pose sur la piste 06 de Lukla
Le paysage et les objets autour de Syangboche sont une création de la compagnie ORBX. Une fois en rapprochement de Lukla, vous observerez un changement dans la conception du paysage : c’est que la scène n’est plus de la compagnie Orbx, mais plutôt une addition que vous devrez vous procurer: Aerosoft (Lukla). L’intégration des deux paysages est tout de même très bien réussie.
Un avion Twin Otter vient de se poser sur la piste de Lukla
Un avion Twin Otter de la compagnie Kenn Borek sort de piste à Lukla
Ce vol exigera toute votre attention. Bonne chance! Pour d’autres idées de vos exigeants, visitez la section « simulation de vol« .
Pour d’autres articles dans la catégorie “Simulation de vol”, cliquez sur le lien suivant : Simulation de vol
Un avion de la Sat Airlines est en finale pour l’altiport Peyresourde Balestas
La simulation de vol nous permet d’utiliser toutes les couleurs de compagnies et tous les types d’aéronefs. Dans le cas présent, un DHC-8-227Q de Sat Airlines, avec le logo Sakhalin Energy, s’est mystérieusement retrouvé en rapprochement pour l’altiport de Peyresourde.
Un avion de la Sat Airlines est en finale pour l’altiport de Peyresourde
Un avion de la Sat Airlines est en courte finale pour l’altiport de Peyresourde
Peyresourde Balestas se trouve dans les Pyrénées, à 1580 mètres d’altitude. Sa piste ne fait que 335 mètres de long et possède une inclinaison de 15 degrés. L’altiport a été utilisé dans le film de James Bond « Demain ne meurt jamais ». La piste est suffisamment longue pour accommoder un DHC-8-227Q étant donné que l’avion possède un excellent freinage et qu’il est aidé par une piste en forte pente lors de l’arrivée. Si vous touchez tôt, vous n’aurez pas besoin d’appliquer le freinage maximal.
Sat Airlines Sakhalin Energy et l’altiport de Peyresourde (fsx)
Le Dash 7, qui peut manœuvrer sur n’importe quel type de terrain, pourrait également utiliser cette piste, en autant que le montant de carburant et de cargo est raisonnable. Car ce qui atterrit doit aussi redécoller.
L’altiport de Peyresourde Balestas a été conçu par LLH Creations, de France. Cette compagnie a déjà produit des altiports situés dans les Alpes Françaises, mais Peyresourde est le premier qui se trouve dans les Pyrénées.
Virtualcol a conçu le Dash-8 utilisé pour ce vol. Pour un prix très raisonnable, la compagnie offre, en un seul envoi, un nombre étonnant de livrées de compagnies et toute la série des Dash-8. Leur produit est suffisamment détaillé et il respecte les ordinateurs moins puissants quant aux FPS (Frame per seconds). Ne vous attendez pas au même réalisme que pour le Q400 de Majestic Software : Majestic offre un Q400 qui est dans une classe à part dans le monde de la simulation de vol et le prix est en conséquence.
Le plaisir ne se termine pas après l’atterrissage. Le décollage est également spectaculaire. Appliquez les freins, plein pouvoir et le montant de volets appropriés et allez-y! Vous constaterez que la fin de piste arrive très rapidement et que la vitesse augmente à un rythme que vous n’auriez jamais cru possible avec un Dash 8!
Aéroport de Peyresourde Balestas et un avion DHC-8-202Q de Sat Airlines Sakhalin Energy
Un avion DHC-8-202Q propriété de Sat Airlines Sakhalin Energy quitte la piste de Peyresourde Balestas
Vos passagers se rappelleront certainement de cet altiport. Vous également!
Vous pouvez consulter la section des « vols virtuels exigeants » du présent site internet pour retrouver d’autres suggestions de vols susceptibles de vous donner quelques sueurs froides.
Pour d’autres articles dans la catégorie “Simulation de vol”, cliquez sur le lien suivant : Simulation de vol
Voici un vol qui a été ajouté récemment dans la section des vols virtuels exigeants:
Si vous êtes à la recherche d’un défi, essayez un vol de l’aéroport de Kokoda vers Kagi, en utilisant un DHC-7. Kagi est situé le long de la Kokoda Trail en Papouasie Nouvelle-Guinée. La piste a une dénivellation de 12.5 degrés et est d’une longueur approximative de 447m (1466 ft). L’altitude de la piste est d’environ 3900 ft msl. Vous aurez besoin de la scène (AYPY) Jacksons Airport conçue par Ken Hall et Tim Harris, de la compagnie ORBX. D’autres produits de cette compagnie seront également requis tels que Global, Vector et Holgermesh, afin d’obtenir les mêmes vues que ce que vous observez dans les photos ci-dessus. Pour trouver les aéroports, deux cartes sont inclues dans les « User documents » inclus avec AYPY.
De Havilland Canada DHC-7 Dash 7 au-dessus de la Kokoda trail en Papouasie Nouvelle-Guinée
Virage serré à droite pour un Dash 7 (FSX) atterrissant à Kagi, Papouasie Nouvelle-Guinée
Un Dash 7 (FSX) en finale pour Kagi, Papouasie Nouvelle-Guinée
Un Dash 7 des Nations Unies arrêté pour un court instant à Kagi
De Havilland Dash 7 au décollage de Kagi
J’ai ajusté le carburant à 50% dans chaque réservoir. Pour ce vol, il y a cinq passagers et les baggages. Évidemment, l’aéronef aurait pu être beaucoup plus chargé. Mais, étant donné qu’il s’agissait d’un premier essai à Kagi avec un Dash 7, j’ai pensé qu’un poids moins important augmenterait mes chances d’atterrir sans tout casser en utilisant une vitesse d’approche moins grande.
L’atterrissage à Kagi se fait sur la piste 07 et le décollage sur la piste 25. De l’aéroport de Kokoda, suivez la Kokoda Trail et, lorsque vous êtes suffisamment proches de tous les petits villages inscrits sur la carte fournie, faites un virage à droite vers Kagi. Il y a plusieurs petites pistes dans un secteur relativement restreint. La meilleure façon de procéder est de survoler la région en vol lent pour vous assurer que ce que vous voyez en vol et sur la carte reflètent bien Kagi.
Les deux aspects les plus difficiles de l’approche sont les virages à grande inclinaison requis alors que l’avion est près des montagnes et qu’il est en configuration de vol lent. Le second facteur d’importance est de se rappeler que la piste a 12.5 degrés de dénivellation. Mais une fois que vous serez sur la piste, le Dash 7 arrêtera pratiquement instantanément à cause de la pente. Le décollage se fait sur la piste 25 et ne constitue pas un problème pour cet avion et avec une telle pente descendante. Vous serez en vol rapidement.
Je suis convaincu que vous apprécierez ce vol particulièrement exigeant. Il y a beaucoup d’arbres et de plantes luxuriantes dans cette scène: cela offre une approche réaliste et très intéressante. Je vous souhaite beaucoup de plaisir et espère que les passagers auront toujours un sourire lors de l’arrivée!
P.S.: Le vol a été effectué avec FSX.
Pour d’autres articles dans la catégorie “Simulation de vol”, cliquez sur le lien suivant : Simulation de vol