Ci-dessous se trouvent quelques captures d’écran prises durant des vols virtuels avec Microsoft Flight Simulator 2020 (MFS 2020).
Le Mont St-Michel en France, sous MFS 2020.
Le Mont St-Michel est une addition très intéressante à la scène virtuelle de la France sous MFS 2020. On retrouve de tels sites à plusieurs endroits dans le simulateur de vol de Microsoft, mais plusieurs sont également disponibles gratuitement à travers la communauté des amateurs de simulation de vol. Elles peuvent être téléchargées et installées dans MFS 2020, ce qui permet d’améliorer l’expérience globale.
Heading to KLAX from KBUR with a TBM 930 on the flight simulator MFS 2020.
La brume sèche est bien présente dans la région de Los Angeles et ajoute au réalisme de la scène virtuelle ci-dessous. La peinture FedEx sur le TBM 930 provient du site Liveries Mega Pack Manager.
Une partie de la ville de Puerto Vallarta dans Microsoft Flight Simulator 2020 et améliorée par John Lovell.
Dans la capture d’écran ci-dessus, l’Icon A5 Kingfisher est en vol le long de la côte de Puerto Vallarta au Mexique. La scène virtuelle a été passablement améliorée par John Lovell et est disponible gratuitement sous Flightsim.to. Vous devrez cependant réserver un espace de 5 GIG sur le disque dur!
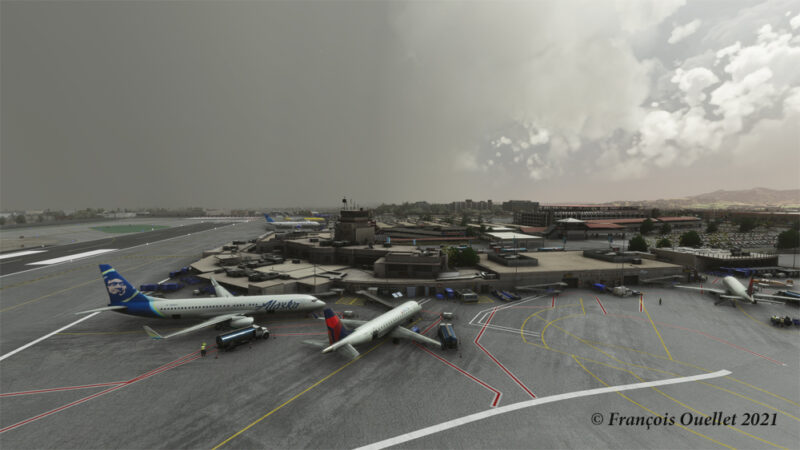
L’aéroport de Burbank Bob Hope modélisé par Orbx et sur le simulateur de vol MFS 2020.
La photo ci-dessus montre une petite partie de l’aéroport virtuel Burbank Bob Hope (KBUR) qui a été modélisé par Orbx. La capture d’écran a été prise au moyen du drone X-Box. Ce drone est une superbe addition aux outils maintenant disponibles pour les amateurs de simulation de vol quand vient le temps de conserver des souvenirs d’un vol.
En route vers Iqaluit (CYFB) avec le simulateur de vol MFS 2020.
En route vers Iqaluit (CYFB), le jet dans la photo ci-dessus vient de sortir des nuages et du givre blanc est encore visible sur le nez et les bords d’attaque des ailes de l’avion. Ce soir-là, il y avait un sigmet rapportant de la turbulence à haut niveau et c’est exactement ce que j’ai expérimenté durant le vol en utilisant REX Weather Force 2020 comme moteur météo.
L’amateur de simulation de vol aura du plaisir à tenter ce court vol (14 minutes) entre l’aéroport virtuel de Eagle County (KEGE) et l’aéroport virtuel de Telluride (KTEX). Le vol virtuel, sous FSX, a été effectué durant l’hiver, plus précisément le 8 janvier (pour ceux qui voudraient répéter l’expérience). Les photos ci-dessous représentent une idée de ce qu’il est possible d’observer en route pour Telluride. Une altitude de 14,000 pieds devrait suffire….
MD-11 de FedEx roule à l’aéroport d’Eagle County (KEGE) (FSX)
MD-11 de FedEx au décollage de l’aéroport de Eagle County (KEGE) (FSX)
MD-11 de FedEx en route de Eagle County airport (KEGE) vers Telluride (KTEX) (FSX)
Il y a beaucoup de belles montagnes entre KEGE et Telluride, et aussi une météo passablement imprévisible…
MD-11 de FedEx entre l’aéroport de KEGE et celui de KTEX (FSX)
Le plafond prévu à Telluride était de 8500 ft. En route vers l’aéroport, les nuages et la visibilité obscurcissaient parfois les montagnes.
MD-11 de FedEx sur un trajet Eagle County (KEGE) Telluride (KTEX) (FSX)
Telluride est un aéroport invitant pour un MD-11. La piste de 7000 pieds ne représente pas un grand défi, même si avec sa largeur de 100 pieds elle demeure un peu étroite : cet avion exige normalement une piste d’atterrissage de 150 pieds de large.
L’approche VFR virtuelle faite avec le MD-11 constituait la façon la plus dispendieuse de faire le voyage étant donné qu’elle exigeait un vol par le travers de Telluride suivi d’un virage de 270 degrés vers la droite pour un alignement piste 09.
MD-11 de FedEx passe par le travers de l’aéroport de Telluride (KTEX) (FSX)
Le virage de 270 degrés a été effectué avec un angle variant entre 10 et 20 degrés pendant que l’altitude passait de 14,000 à 10,000 pieds de façon à éviter toute manœuvre radicale. Pendant le virage et la descente, la vitesse a progressivement été réduite à 160 kts. Le MD-11 était maintenant établi en finale avec les volets réglés à 50 degrés.
Un MD-11 de FedEx en longue finale piste 09 pour l’aéroport de Telluride (KTEX) (FSX)
La piste d’atterrissage en altitude de 9078 pieds au-dessus du niveau de la mer signifiait que le pilote devait considérer une densité de l’air plus faible et ajuster la vitesse de l’appareil en conséquence pour éviter un décrochage en finale.
Un MD-11 de FedEx en finale piste 09 pour l’aéroport de Telluride (KTEX) (FSX)
Voici une vue à partir de la tour de Telluride…
Vue à partir de l’aéroport de Telluride (KTEX) (FSX) d’un MD-11 de FedEx en finale piste 09
Avec une vue comme celle-là, pas question d’arriver en mode IFR…!
Un MD-11 de FedEx en provenance de KEGE en finale pour l’aéroport de Telluride (KTEX) (FSX)
De façon à prévenir une approche manquée et des dépenses supplémentaires en carburant (qui étaient déjà anormalement élevées), une approche optimale était requise.
La plupart des accidents impliquant un MD-11 se produisent lorsque le pilote pousse sur le manche lorsqu’il y a un rebond de la roue avant, créant ainsi un rebond supplémentaire encore plus prononcé. Lorsqu’il y a un rebond, il n’est pas nécessaire d’appuyer sur le manche : il suffit d’attendre que l’avion se stabilise et la roue de nez redescendra d’elle-même rapidement.
Un MD-11 de FedEx au-dessus du seuil de piste 09 à l’aéroport de Telluride (KTEX) (FSX)
C’est le moment du freinage maximal et des inverseurs de poussée…
Un MD-11 de FedEx en freinage piste 09 à l’aéroport de Telluride (KTEX) (FSX)
Le MD-11 peut facilement quitter la piste à la première voie de circulation à Telluride. Mais dans le but de capturer une meilleure vue de l’aéroport, j’ai utilisé la dernière voie de circulation (ajoutant encore un peu aux dépenses extravagantes en carburant)…
Un MD-11 de FedEx quitte la piste 09 à l’aéroport de Telluride (KTEX) (FSX)
L’employé sur la rampe semble se demander si l’aile du MD-11 risque d’accrocher le jet d’affaires N900SS en circulant. Mais il y avait suffisamment d’espace (environ 11 pouces!).
Un MD-11 de FedEx circule sur la rampe à l’aéroport de Telluride (KTEX) (FSX)
Le MD-11 a été stationné temporairement à un endroit privilégié de l’aéroport. Il a été nécessaire de décharger rapidement le précieux cargo et dégager l’aire de ravitaillement.
Stationnement temporaire improvisé pour un MD-11 de FedEx à l’aéroport de Telluride (KTEX) (FSX)
De l’aide de professionnels sera requise pour aider à déplacer le MD-11 et le ramener vers la piste. Mais cela est le problème du gestionnaire de l’aéroport qui a promis d’avoir l’équipement nécessaire au moment des communications avec FedEx!
MD-11 de FedEx stationné à l’aéroport de Telluride (FSX)
La scène virtuelle, du départ jusqu’à la destination, est une création des programmeurs de la compagnie ORBX. Le MD-11 virtuel provient de PMDG Simulations (je ne suis pas certain que l’appareil fonctionne sous P3D). Le moteur météo est conçu par REX Simulations, qui est également le fournisseur des textures de nuages, en combinaison avec Cumulus X. (Edit: le MD-11 n’est plus supporté par PMDG).
Pour d’autres vols virtuels exigeants, dirigez-vous vers la section « simulation de vol » de mon site web, sous « vols virtuels exigeants ».
Pour d’autres articles dans la catégorie “Simulation de vol”, cliquez sur le lien suivant : Simulation de vol
Un DHC-6 Twin Otter virtuel en route pour Kokoda après un feu sur le moteur droit au départ de Yongai (KGH) en Papouasie Nouvelle-Guinée PNG (FSX)
Ken Hall et Tim Harris ont créé une nouvelle scène virtuelle pour les amateurs de simulation de vol. Elle se nomme « Tapini» et est vendue par ORBX. Leur avant-dernière création, AYPY Jackson’s International, permettait aux pilotes virtuels de voler vers des aéroports virtuels très exigeants le long de la Kokoda Trail en Papouasie Nouvelle-Guinée. « Tapini » représente un tout nouveau défi et j’ai inclus plusieurs captures d’écran pour vous donner une impression générale des différentes pistes incluses dans cette nouvelle scène virtuelle.
« Tapini », toujours en Papouasie Nouvelle-Guinée, permet aux pilotes virtuels de se mesurer aux défis présentés par sept nouvelles pistes d’atterrissage dans la chaîne de montagnes Owen Stanley. Ces aéroports constituent également un sérieux test pour les aéronefs, comme dans la photo ci-dessus où des dommages au moteur droit ont été subis à Yongai.
Un Piper Pacer virtuel s’apprête à atterrir sur la piste courbée d’Ononge (ONB) en Papouasie Nouvelle-Guinée PNG (FSX). (Il est possible de voir la courbe débutant au haut de l’image)
Pour améliorer les nuages virtuels lors des voyages entre les différents aéroports, j’ai utilisé les moteurs météo REX ou FSGRW. Les textures de nuages et les effets météo ont été améliorés par un ou plusieurs des produits suivants : CumulusX, PrecipitFX, REX Texture Direct et REX Soft Clouds.
Un Dash 7 virtuel après son atterrissage sur l’aéroport de Woitape (WTP) en Papouasie Nouvelle-Guinée PNG (FSX)
Comme il y a du plaisir dans la variété, et également dû aux défis posés par les différentes pistes, les avions virtuels suivants ont été utilisés : Carenado C-185F, Lionheart Creations PA-18, Virtavia DHC-4, Aerosoft DHC-6 Twin Otter et Milton Shupe De Havilland DHC-7.
La scène « Tapini » offre au pilote la sélection des sept pistes suivantes :
ASB (Asimba)
Une piste difficile et très courte près d’une rivière
Un DHC-4 Caribou virtuel en approche pour la piste en pente d’Asimba (ASB) en Papouasie Nouvelle-Guinée PNG (FSX)
Il s’agit d’une piste très intéressante où un avion ADAC tel que le DHC-4 Caribou est approprié. Les habitants doivent cependant offrir leur aide pour vous aider à dégager quelques branches près de la piste et qui sont susceptibles de nuire à un appareil de cette taille. La piste est en pente vers le bas pour le décollage, ce qui aide l’avion à gagner de la vitesse plus rapidement.
Un DHC-4 Caribou virtuel au sol sur la piste d’Asimba (ASB) en Papouasie Nouvelle-Guinée PNG (FSX)
Un DHC-4 Caribou virtuel décolle de la piste en pente d’Asimba (ASB) en Papouasie Nouvelle-Guinée PNG (FSX)
FNE (Fane)
Une piste en pente de 12 degrés présentant un vrai défi. Des vents imprévisibles soufflent sur cette piste à sens unique située en haut d’une colline.
Un avion virtuel De Havilland DHC-7 est en approche pour un atterrissage sur la piste en pente de l’aéroport de Fane (FNE) en Papouasie Nouvelle-Guinée PNG (FSX).
La piste est située au-dessus d’une colline. Atterrir sur cette piste est une expérience vraiment intéressante : pas étonnant qu’il y ait autant de personnes surveillant les arrivées et départs.
Si vous ralentissez trop rapidement après l’atterrissage sur cette piste en pente avec un avion tel que le DHC-7, les douze degrés empêcheront l’appareil de continuer à se déplacer vers l’avant. Vous devrez alors laisser l’avion redescendre doucement la pente en utilisant le pouvoir des moteurs pour contrôler la descente. Le palonnier sera utilisé pour demeurer aligné avec la piste. Il s’agira ensuite d’appliquer de nouveau la pleine puissance pour quelques secondes, juste assez pour franchir la pente.
Un avion virtuel De Havilland DHC-7 circule après un atterrissage sur la piste en pente de l’aéroport de Fane (FNE) en Papouasie Nouvelle-Guinée PNG (FSX)
Pour circuler au sol et replacer le DHC-7 pour le décollage, une combinaison de pouvoir et de poussée inverse est nécessaire jusqu’à ce que tous les obstacles aient été évités (les humains s’aventurant à l’arrière de l’appareil pendant la procédure pourraient être affectés…).
Un avion virtuel De Havilland DHC-7 décolle de la piste en pente de l’aéroport de Fane (FNE) en Papouasie Nouvelle-Guinée PNG (FSX)
Il y a un homme qui n’a pas l’air trop amical et qui tient une carabine près de la zone d’embarquement. Même le personnel des Nations-Unies n’a pas jugé bon de s’éterniser…
KGH (Yongai)
Une piste très bosselée et à sens unique. Un vrai avion de brousse est ici requis!
Un DHC-6 Twin Otter virtuel en approche pour la piste bosselée de Yongai (KGH) en Papouasie Nouvelle-Guinée PNG (FSX)
Même avec un très bon avion de brousse, il est possible qu’une des hélices de l’appareil touche le sol au moment de circuler sur cette piste vraiment spéciale. Il y a tellement de trous profonds et de bosses qui sont difficiles à voir que je ne peux que souhaiter bonne chance à toute personne s’aventurant sur cet aéroport!
Un DHC-6 Twin Otter virtuel au sol sur la piste de Yongai (KGH) en Papouasie Nouvelle-Guinée PNG (FSX)
Portez une attention particulière à la zone près de la petite maison en fin de piste. Le DHC-6 a vraiment été secoué en effectuant les manœuvres pour se repositionner pour le décollage. Une des hélices a touché le sol, mais il n’y avait pas de signes de problème sérieux… jusqu’à ce que l’avion redécolle. L’alarme de feu a retenti juste au moment où l’appareil franchissait le seuil de piste.
Un DHC-6 Twin Otter virtuel avec le moteur droit en feu au décollage de Yongai en Papouasie Nouvelle-Guinée PNG (FSX)
Il a donc fallu abandonner le voyage prévu. Et pas question de retourner à Yongai sur un moteur. J’ai tiré la manette pour éteindre le feu, mis l’hélice en drapeau et coupé l’alimentation en carburant sur le moteur droit pour ensuite me diriger vers l’aéroport de Kokoda étant donné qu’il s’agissait d’un déroutement sûr dû au fait que la piste est suffisamment longue et à une altitude beaucoup plus basse que Yongai.
KSP (Kosipe)
Une piste relativement courte qui requiert des calculs précis de la part du pilote étant donné sa haute altitude dans les montagnes.
Un Cessna C-185F virtuel en route pour l’aéroport de Kosipe (KSP) en Papouasie Nouvelle-Guinée PNG (FSX)
Le Cessna C-185F est très approprié pour cette courte piste. Assurez-vous de ne pas appuyer trop fortement sur les freins à l’arrivée, car les hélices de C-185 sont difficiles à trouver à Kosipe. Vous pouvez atterrir dans les deux directions. Le mélange air/essence doit être absolument ajusté, car l’aéroport se trouve à plus de 6300 pieds.
Un Cessna C-185F virtuel à l’atterrissage sur la piste de Kosipe (KSP) en Papouasie Nouvelle-Guinée PNG (FSX)
Un Cessna C-185F virtuel au décollage de la piste de Kosipe (KSP) en Papouasie Nouvelle-Guinée PNG (FSX)
ONB (Ononge)
Une piste courbée et très bosselée. Pour ceux qui aiment les vols en rase-mottes. Assurez-vous de choisir le bon appareil, car il n’y a pas beaucoup de place pour manœuvrer une fois au sol.
Un Piper Pacer virtuel en approche pour la piste courbée d’Ononge (ONB) en Papouasie-Nouvelle Guinée PNG (FSX)
Ononge est assez impressionnant lorsqu’on se présente en finale pour la première fois. On se demande si la petite trace de terre sur le dessus de la colline peut vraiment être une piste d’atterrissage. Pour ce genre de situation, le Piper Pacer est un excellent avion : il peut approcher très lentement et s’immobilise sur une courte distance. La piste étant courbée, il est nécessaire d’utiliser un peu de palonnier pour maintenir l’avion au milieu de la piste.
A Virtual Piper Pacer on the Ononge curved runway in Papua New Guinea PNG (FSX)
J’imagine que tous ces gens avec leurs valises s’attendaient à un avion un peu plus gros…
Un Piper Pacer virtuel au décollage de la piste courbée d’Ononge (ONB) en Papouasie-Nouvelle Guinée PNG (FSX)
TAP (Tapini)
Une piste exigeante à sens unique et située près d’une vallée étroite. Vous pouvez même utiliser un ILS pour vous y rendre!
Un DHC-4 Caribou en approche finale pour l’aéroport de Tapini (TAP) en Papouasie Nouvelle-Guinée PNG (FSX)
Il s’agit d’une région et d’un aéroport superbement modélisés. Je l’ai visitée avec le DHC-4 Caribou, mais tout autre gros avion ADAC aurait fait l’affaire. Il y a suffisamment de place pour manœuvrer. La piste n’est pas trop bosselée. La pente est intéressante : elle débute en descendant et se termine en montant : cela aide l’aéronef à ralentir après l’atterrissage.
Un DHC-4 Caribou au sol à l’aéroport de Tapini (TAP) en Papouasie Nouvelle-Guinée PNG (FSX)
Un DHC-4 Caribou virtuel décolle de l’aéroport de Tapini (TAP) en Papouasie Nouvelle-Guinée PNG (FSX)
WTP (Woitape)
Cette piste à sens unique et en pente légère semble assez facile d’usage mais elle nécessite des calculs et ajustements assez précis si vous désirez vous y poser avec autre chose qu’un petit appareil.
Un De Havilland DHC-7 virtuel en approche finale pour l’aéroport virtuel de Woitape airport (WTP) en Papouasie Nouvelle-Guinée (FSX)
J’ai trouvé que la piste était assez glissante pour le De Havilland DHC-7. Je dois avouer qu’il y avait un vent de côté important (je volais en météo réelle téléchargée par internet). Le DHC-7 se comporte comme un gros bateau lorsqu’il décélère sur une telle piste.
Un De Havilland DHC-7 virtuel ainsi que deux DHC-6 au sol à l’aéroport virtuel de Woitape airport (WTP) en Papouasie Nouvelle-Guinée (FSX)
La scène virtuelle de Woitape est superbe. Il est très intéressant de trouver des animaux, personnes et avions virtuels conçus de façon aussi réaliste.
Un De Havilland DHC-7 virtuel au décollage de Woitape (WTP), Papouasie Nouvelle-Guinée, (FSX)
J’adore ce nouveau produit de la compagnie Orbx. Lorsque vous volez dans un paysage aussi réaliste, le cerveau ne fait pas de différence entre ce qui est réel et ce qui est virtuel. Cela fonctionne vraiment! Et si vous utilisez la météo réelle téléchargée de l’internet, c’est encore mieux!
J’ai essayé les sept aéroports inclus dans la scène virtuelle « Tapini » et ils sont exigeants. Yongai a été pour moi celui présentant le plus grand défi. J’ai dû faire deux approches manquées étant donné que je me suis présenté chaque fois trop haut sur l’approche. Mais j’ai éventuellement réussi, comme dans la vraie vie!
Le logiciel Microsoft flight simulator X (FSX) a été utilisé pour tous les vols, mais d’autres plateformes auraient également très bien fonctionné et donné d’excellents résultats (Dovetail Games FSX Steam edition (FSX: SE) et toutes les versions de P3D). Les produits suivants étaient également installés sur mon simulateur de vol : FTX Global, FTX Golbal Vector et Holgermesh, de même que Pilot’s FS Global 2010.
Il s’agit d’une expérience virtuelle totalement immersive et vous devez vous concentrer totalement lorsque vous tentez ces vols virtuels exigeants… si vous désirez en ressortir « virtuellement » vivant!
Pour d’autres articles dans la catégorie “Simulation de vol”, cliquez sur le lien suivant : Simulation de vol
FSGRW est un moteur météo et il utilise les données réelles de l’internet pour simuler la météo existante autour du monde (24000 + aéroports).
Le programme simule précisément ce qui se passe dans l’atmosphère jusqu’à FL520, incluant les ouragans et tempêtes tropicales.
FSGRW n’est pas vendu avec des sets supplémentaires de textures de nuages. Comme Active Sky Next (ASN) ou OpusFSI, vous devez vous procurer ces sets (REX a d’excellents produits). FSGRW utilisera alors ces nouvelles textures pour représenter les données téléchargées par internet, au lieu d’utiliser les vieux fichiers de nuages créés il y a plusieurs années par Microsoft.
FSGRW n’a pas été créé pour vous donner accès à toutes sortes d’options de luxe comme la possibilité d’intégrer des données météo directement sur le radar météo des gros porteurs. Il s’agit d’un programme simple mais très efficace qui vise à représenter avec précision la météo.
FSGRW reproduit certains des effets locaux les plus connus.
Glacier en vue! Capture d’écran obtenue au moyen des produits suivants: FSGRW, REX, et une combinaison de créations de la compagnie Orbx. Édition finale avec un logiciel de traitement de photo (légères retouches seulement)
FSGRW est compatible avec FS2004, FSX, ESP, P3D, Steam et X-Plane.
FSGRW vous donne la possibilité d’utiliser la météo présente à un certain aéroport et de la transposer à un autre endroit. Vous avez accès à la météo passée au travers de fichiers sauvegardés. Vous pouvez également choisir entre la météo statique et dynamique (renouvelée toutes les six minutes depuis la version 027).
Vous pouvez créer votre plan de vol et votre séquence météo.
FSGRW peut fonctionner à travers un réseau.
J’utilise FSGRW en conjonction avec les sets de textures de nuages de REX et je suis très satisfait du résultat. Mais je n’ai aucun doute que les moteurs météo d’ASN, OpusFSI ou REX auraient également donné d’excellents résultats. La seule chose à se rappeler est qu’il est nécessaire de se procurer un moteur météo ET des sets de textures de nuages pour améliorer l’aspect visuel de la météo virtuelle.
Ce moteur météo, tout comme FSGRW, OpusFSI ou REX, actualise la météo en téléchargeant les plus récentes données de l’internet. Il y a aussi une possibilité d’utiliser des données historiques (datant de jusqu’à deux ans).
ASN, FSGRW et OpusFSI utilisent les textures de nuages par défaut de FSX. Ces moteurs météo peuvent bénéficier de sets de textures de nuages supplémentaires (ceux de REX par exemple) pour un meilleur effet visuel.
La couverture et la localisation des nuages sont exactes et réalistes. Des couches épaisses de nuages peuvent être représentées. La transition entre les nuages est progressive, de même que les variations verticales de température et de direction et vitesse du vent.
Les effets reliés aux nuages incluent une visibilité diminuée en vol dans une couverture nuageuse, de la turbulence (dans les nuages, mais également à l’entrée et à la sortie de ceux-ci), une position exacte des précipitations en fonction du type de nuages et de la position relative des formations nuageuses.
Les effets de micro-rafales, cisaillement de vent, grêle, turbulence, de même que les courants ascendants et descendants sont modélisés pour les orages. Il y a des alertes de cisaillement de vent lorsque vous volez à travers une cellule orageuse : cela ne sera pas nécessairement d’une grande aide si vous tentez de traverser la cellule d’un orage fort puisque, comme dans la vraie vie, vous risquez de ne pas vous en sortir…
Vous pouvez utiliser le radar pour naviguer à travers la mauvaise météo étant donné que la position des nuages et le radar sont synchronisés. Le radar météorologique montre l’intensité des précipitations de même que le sommet des échos.
Des avertissements sonores seront déclenchés lorsque de nouveaux Sigmets ou Airmets sont émis. Ces derniers couvrent la planète et peuvent être visualisés sur une carte. La turbulence et le givrage associés sont ajoutés en fonction des avertissements.
En vol, vous pouvez recevoir des mises à jour verbales à travers l’ATIS, le Flight Watch ou la FSS.
ASN corrige les problèmes parfois associés avec les nuages bas, comme la couverture inappropriée ou la position inexacte des nuages, ou encore des couches qui sont vraiment trop minces.
Comme pour les autres moteurs météo, il y a un mode de plan de vol. Vous pouvez entrer, importer ou créer un plan de vol, de même que changer le plan de vol et les points de compte-rendu avant ou durant le vol.
La météo, les aéroports et les aides à la navigation sont affichés et peuvent être édités, ajoutés ou effacés. Les prévisions météorologiques sont disponibles à travers du texte ou des graphiques. Si, le long de la route de vol, il n’y a pas de Metar émis pour plusieurs heures, le moteur météo utilisera les prévisions météorologiques pour effectuer les mises à jour.
Les courants thermiques sont modélisés en utilisant la température et la surface du terrain.
Les traînées de turbulence de sillage sont visibles et, comme dans la réalité, se déplacent en fonction du vent.
ASN ne se fie pas seulement sur l’interpolation pour couvrir les grandes surfaces océaniques et autres territoires où il y a peu de stations météorologiques.
Les développeurs d’ASN disent avoir créé une simulation réaliste des ouragans basée sur les données actualisées concernant ces systèmes. Leur programme corrigerait automatiquement les données de surface qui peuvent sembler incorrectes. Je ne peux commenter sur le réalisme de cette simulation étant donné que je ne l’aie pas encore essayée. Mais si l’effet est réussi, cette fonction devrait intéresser toute personne désireuse d’expérimenter ce que provoque un vol près ou à l’intérieur d’un ouragan.
ASN est compatible avec FSX, FSX : SE et P3D v2.5 (SP3 est compatible avec P3D v2.4 ou précédente). Il supporte un simulateur utilisant plusieurs écrans.
Je n’énumère pas ici toutes les caractéristiques de cet intéressant logiciel étant donné que de nouvelles options sont continuellement rajoutées. Si vous désirez plus de détails, j’ai inclus un lien ci-dessous. Comme pour tous les moteurs météo, prenez le temps de voir ce que chacun a à offrir étant donné qu’ils ont des propriétés et un spectre d’options très différentes.
REX offre deux éléments importants à travers ses différents produits : 1) un moteur météo qui télécharge la météo réelle dans votre ordinateur tout en générant les différents phénomènes atmosphériques à travers son programme REX Essential Plus et 2) des textures de nuages très réalistes (à travers les additions Overdrive, Texture Direct, Soft Clouds).
Une fonction de planification de vol est inclue, de même que de nombreuses fonctions pour créer des thèmes météo spécifiques qui incluront les choix de nuages, de luminosité du ciel, de rayonnement du soleil, de textures et couleurs de l’eau.
Vous avez également la possibilité de choisir les types d’asphalte pour les pistes d’atterrissage, les sons associés aux orages de même que les sortes d’éclairs qui illumineront votre ciel virtuel.
REX fonctionne sur toutes les plateformes, incluant X-Plane.
Voici les produits de REX qui, chacun, jouent un rôle très différent :
Rex Essential Plus : un moteur météo qui fournit également des textures de nuages et de multiples options dans le but de simuler le plus exactement possible les phénomènes météorologiques pour l’endroit que vous avez choisi. Le moteur météo sera bientôt renouvelé avec la venue prochaine de REX Weather Direct.
REX Overdrive : ajoute 12 GB de textures de nuages.
REX4 Texture Direct : ajoute un autre 16 GB de textures de nuages, et des possibilités de créer des thèmes météo complets selon vos préférences, tout en ayant la possibilité d’utiliser les thèmes d’autres pilotes virtuels de la communauté REX.
REX Soft Clouds : ajoute des nuages volumétriques dans la couche inférieure de l’atmosphère pour un plus grand réalisme.
REX4 Weather Architect : un programme qui vous permet de créer un système météo précis et de le positionner à l’endroit où vous le désirez sur la planète. Il ne s’agit pas d’un moteur météo : il n’ira pas sur internet chercher de nouvelles données pour les intégrer à votre ordinateur.
REX Weather Direct : un nouveau moteur météo amélioré qui sera, lorsqu’il sera mis en marché, compatible avec DX9, DX10 et DX11, de même qu’avec FSX, FSX : SE (Steam Edition) et P3D.
Sur les forums destinés au vol virtuel, les usagers semblent avoir une préférence pour le moteur météo Active Sky Next (ASN) en combinaison avec les textures de nuages de REX. C’est une bonne combinaison de produits, mais ce n’est pas la seule qui mérite qu’on s’y attarde : vous avez accès à la combinaison FSGRW et REX (celle que j’utilise pour le vol virtuel et qui offre des résultats très précis) de même que la combinaison OpusFSI et REX, ASN et ASN2012 (moteur météo ASN allié aux textures de nuages de ASN2012) ou encore seulement des programmes combinés REX (le prochain REX Weather Direct associé aux textures de nuages de REX).
Tout cela dépend de vos priorités : la grande simplicité et le réalisme absolu de FSGRW, la facilité d’utilisation d’une caméra virtuelle de même qu’un mode supportant les mouvements de la tête sous OpusFSI, etc. Il est préférable de lire beaucoup et de prendre le temps nécessaire avant de sauter trop rapidement à une conclusion.
Certains moteurs météo pourraient exiger quelques modifications pour être compatibles avec des versions récentes de P3D, si l’on en croit ce qui se dit sur les forums spécialisés.
L’ancienne appellation était OpusFSX mais depuis l’arrivée sur le marché de P3D, le produit s’appelle maintenant OpusFSI, un nom plus générique.
OpusFSI
OpusFSI est un moteur météo qui, à l’instar de FSGRW, ASN ou REX, télécharge la météo actuelle la plus près de votre route de vol et l’intègre dans votre ordinateur de façon régulière pour que votre vol virtuel se fasse toujours dans des conditions de météo actualisée.
OpusFSI ne fournit pas de textures de nuages additionnelles. Si vous désirez des textures plus intéressantes, il est préférable d’utiliser OpusFSI en conjonction avec REX.
Le programme peut fonctionner sur un réseau, ce qui est pratique si vous désirez transférer certaines fonctions d’OpusFSI vers un deuxième ordinateur pour ménager les ressources de l’ordinateur principal.
OpusFSI est compatible avec FSX, FSX : SE et P3D et même avec les contrôles deTrackIR real-time 3D view (certains fichiers devront être désactivés dans Program Files si vous utilisiez déjà TrackIR avant de vous procurer Opus). Vous avez accès à de multiples cartes graphiques pour consulter la météo ou les SIDs/Stars et pour ajuster les différentes options à votre goût.
OpusFSI est un programme très avancé qui est bien adapté à l’usage des caméras de cockpit virtuelles. Il reproduit les mouvements de tête causés par les vibrations et la turbulence et permet de varier les vues de gauche à droite lors des manœuvres de circulation au sol ou des virages en vol. Tous les effets sont variables et peuvent être ajustés par l’utilisateur.
Si votre système comporte plusieurs écrans, il vous est possible de programmer des vues différentes pour chaque écran de façon à simuler les fenêtres de droite et gauche.
OpusFSI vous permet d’utiliser la météo passée si vous le désirez. Le programme offre également la possibilité de relocaliser la météo au-dessus d’un aéroport A pour la transposer sur l’aéroport B. De même, vous pouvez décider de faire disparaître certaines couches de nuages bas ou choisir d’éliminer les obstacles à la visibilité si vous désirez avoir une vision parfaite du territoire. À la limite, vous pouvez même créer votre propre Metar.
Comme pour les autres moteurs météo sur le marché, vous avez accès à un mode « plan de vol ».
Une option vous permet d’inclure la turbulence et le cisaillement de vent générés par le terrain environnant en-dedans de 80 kilomètres d’un aéroport virtuel.
Les données gérées par OpusFSI peuvent être utilisées directement dans le B-737 NGX de PMDG, ce qui signifie que vous pouvez voir la météo réelle sur le radar de l’appareil.
OpusFSI est en développement continuel et de nouvelles fonctions sont fréquemment ajoutées. Elles ne sont pas toutes énumérées dans le présent article.
Comme pour tous les autres moteurs météo disponibles sur le marché, il est nécessaire de consulter le site de la compagnie afin de choisir le programme approprié au type de vol virtuel que vous pratiquez et à l’équipement que vous utilisez déjà ou prévoyez utiliser.
Survoler la région des Cantons-de-l’Est au Québec dans des conditions météorologiques MVFR présente toujours quelques problèmes à cause du relief. Voici une capture d’écran d’un vol entre l’aéroport de Québec et celui de Sherbrooke pour montrer un peu de quoi à l’air un vol virtuel en automne. Le terrain a été modélisé par la compagnie ORBX.
A2A Simulations C182T Skylane dans la région des Cantons-de-l’Est au Québec
Il ne s’agit ici que des premières collines rencontrées mais, rapidement, le sommet des montagnes les plus hautes sera obscurci dans les nuages. La météo téléchargée en direct est gérée par le moteur FSGRW et les textures de nuages proviennent de REX Texture Direct combiné à REX Soft Clouds. Un logiciel photo a été utilisé pour rehausser les contrastes.
L’avion est un C182T Skylane de la compagnie A2A Simulations. La similitude entre un appareil réel et cet appareil virtuel est absolument incroyable. Il faut tenir compte de toutes les corrections, même de la précession gyroscopique, sinon, progressivement, l’ADF indiquera un chemin à suivre et le compas vous enverra plutôt dans une autre direction!
C182T au décollage de l’aéroport de Parry Sound en Ontario, Canada.
Pour célébrer les couleurs de l’automne, voici une capture d’écran d’un C-182T de A2A Simulations au décollage de l’aéroport de Parry Sound (CNK4) en Ontario, Canada.
L’aéroport est une création de Vlad Maly, pour ORBX. Le moteur météo FSGRW a été utilisé pour suivre la météo réelle ayant cours dans la Baie Georgienne. REX Texture Direct était également de la partie pour les textures de nuages.
La capture d’écran de ce vol virtuel a été légèrement retouchée au moyen d’un logiciel photo afin d’ajouter un peu plus d’intensité à la scène automnale.
Pour d’autres articles dans la catégorie “Simulation de vol”, cliquez sur le lien suivant : Simulation de vol
Glacier en vue! Capture d’écran obtenue au moyen des produits suivants: FSGRW, REX, et une combinaison de créations de la compagnie Orbx. Édition finale avec un logiciel de traitement de photo (légères retouches seulement)
La capture d’écran ci-dessus, intitulée « Glacier en vue », représente un vol virtuel sous FSX. Une combinaison de FSGRW et REX est utilisée pour améliorer l’apparence des nuages.
Comme le programme de base de FSX ne reproduit pas avec grande fidélité des nuages réalistes, il est nécessaire de se procurer un set de textures de nuages mieux modélisés. Dans le cas présent, les nuages créés par la compagnie REX ont été utilisés, à travers leurs programmes Texture Direct et Soft Clouds combinés.
Il n’est pas tout d’avoir des nuages de qualité, il faut également utiliser un moteur météo digne de ce nom. Ce moteur ira chercher les données réelles sur internet, les intégrera dans votre ordinateur et les renouvellera toutes les quelques minutes si tel est votre choix.
Plusieurs moteurs météo existent, tels que FSGRW, ASN, OpusFSI ou REX, pour ne nommer que les plus populaires. Dans le cas de la photo ci-dessus, j’ai utilisé FSGRW (PILOT’S version 1.7, build 29).
Pour représenter les montagnes et le glacier, les créations d’ORBX, dont SAK, Vector et Open LC Canada-Alaska ont été utilisées. La peinture du DC-3 est téléchargeable gratuitement à partir de grands sites tels que Flightsim.com ou AVSIM.
Dernier point : lorsque la capture d’écran est prise, il est possible d’utiliser un logiciel de traitement de photo (il y en a plusieurs de bonne qualité sur le marché) pour améliorer légèrement un aspect particulier de la photo. Il faudra vraiment peu de temps pour apprendre quelques fonctions de base qui vous permettront d’améliorer vos captures d’écran.
Pour d’autres articles dans la catégorie “Simulation de vol”, cliquez sur le lien suivant : Simulation de vol